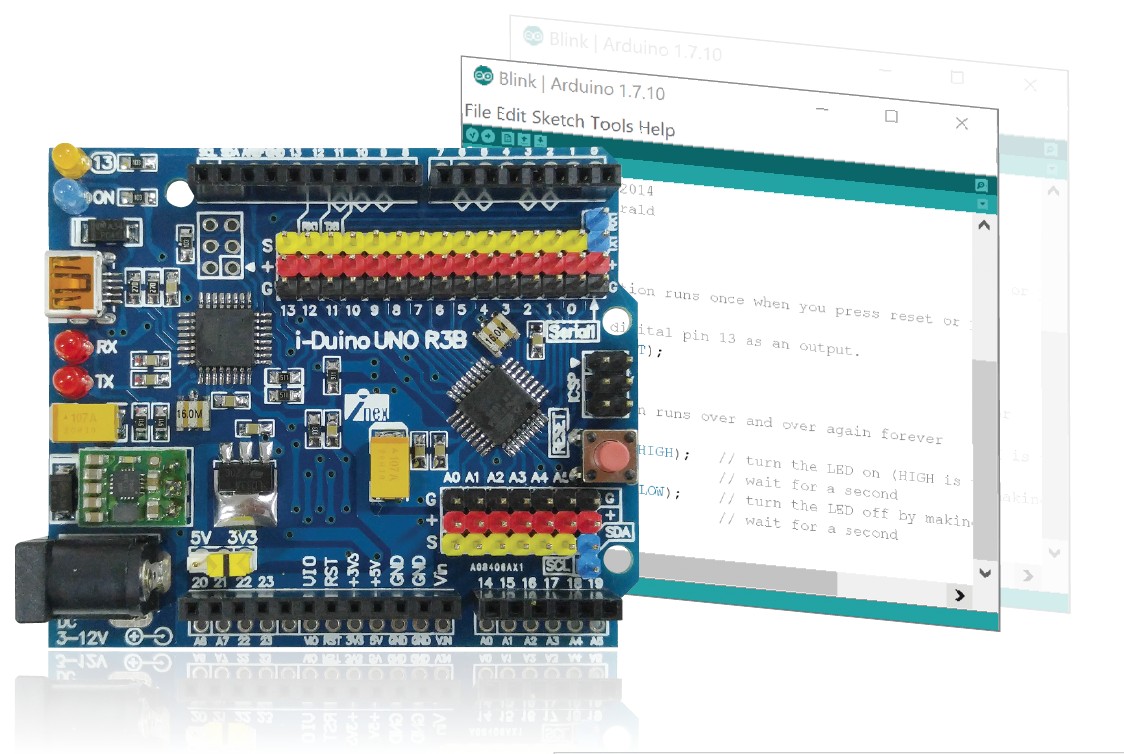
i-Duino UNO R3B คือ บอร์ด Arduino UNO compatible รุ่นใหม่ล่าสุดฝีมือคนไทยที่ใช้ชิป ATmega328PB และมาพร้อมกับ Arduino IDE 1.7.10 เวอร์ชันพิเศษที่พัฒนาต่อยอดโดยคนไทย รุ่นแรกของโลกที่ใช้งานกับชิปใหม่ได้เต็มความสามารถ
i-Duino UNO R3B หรือบอร์ด R3B คือแผงวงจรสำหรับทดลองและใช้งานไมโครคอนโทรลเลอร์ Arduino ที่เข้ากันได้กับ Arduino UNO ราคาประหยัด และมาพร้อมกับอุปกรณ์คุณภาพสูง บรรจุวงจรภาคจ่ายไฟแบบสวิตชิ่งที่มีเสถียรภาพ มีสวิตช์เพื่อเลือกใช้ไฟเลี้ยงทั้ง +5V และ +3.3V ทำให้บอร์ด R3B เป็นแผงวงจร Arduino UNO compatible ในไม่กี่รุ่นในโลกที่รองรับไฟเลี้ยงทั้งสองระบบ และที่เป็นพิเศษคือ ใช้ไมโครคอนโทรลเลอร์ ATmega328PB ซึ่งเป็นชิปรุ่นใหม่กว่า ATmega328P ที่ใช้ใน Arduino UNO รุ่นดั้งเดิม
ใหม่กว่ากับ ATmega328PB ชิปผู้มาแทน
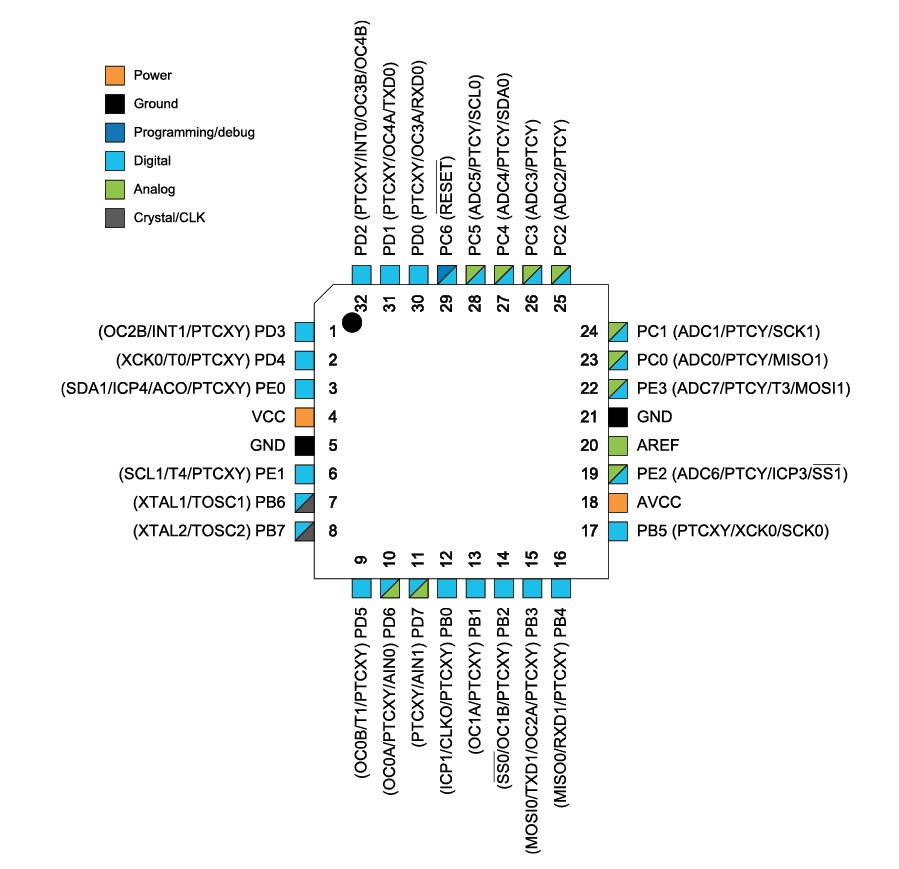
ความใหม่ที่โดดเด่นของบอร์ด R3B ประการแรกคือ เลือกใช้ชิป ATmega328PB เบอร์ใหม่สุดในอนุกรมนี้
ทำให้มีขาพอร์ตมากขึ้น ทั้งอินพุตเอาต์พุตดิจิตอล, อินพุตอะนาลอก, เอาต์พุต PWM, พอร์ตสื่อสารข้อมูลอนุกรม UART เพิ่มอีก 1 ชุด, พอร์ตเชื่อมต่อบัส I2C อีก 1 ชุด, พอร์ตเชื่อมต่อระบบบัส SPI อีก 1 ชุด และทุกขาพอร์ตมีความสามารถอินพุตแบบสัมผัส ดังแสดงการจัดขาของ ATmega328PB ในรูปที่ 1
ส่วนประกอบของบอร์ดที่ยืดหยุ่น
ในรูปที่ 2 แสดงส่วนประกอบต่างๆ ของบอร์ด R3B ซึ่งเข้ากันได้กับ Arduino UNO R3 โดยในบอร์ด R3B ได้เพิ่มเติมจุดต่อพอร์ตอินพุตเอาต์พุตทั้งหมดในรูปแบบที่มีการจัดขาเหมือนจุดต่อเซอร์โวมอเตอร์และสวิตช์เพื่อเลือกระบบไฟเลี้ยง ส่งผลให้บอร์ด R3B มีความพร้อมสำหรับการเรียนรู้และใช้งานไมโครคอนโทรลเลอร์เป็นอย่างดี

นอกจากนั้นยังมีจุดต่อพอร์ตอินพุตอะนาลอกเพิ่มอีก 2 ขาคือ A6 (พอร์ต 20) กับ A7 (พอร์ต 21) และอินพุตเอาต์พุตดิจิตอลอีก 2 ขา (ขา 22 และ 23) อำนวยความสะดวกในการต่อโมดูลสื่อสารข้อมูลอนุกรมให้ง่ายขึ้นด้วยจุดต่อ Serial 1, ต่อพ่วงกับอุปกรณ์บัส I2C และ SPI ได้สะดวก มีจุดต่อพอร์ตแบบ IDC ตัวผู้ ทำให้ใช้งานได้หลากหลายมากขึ้น
ด้านภาคจ่ายไฟ ด้วยวงจรแปลงแรงดันไฟตรงแบบ Boost และ Bulk ทำให้ใช้แหล่งจ่ายไฟได้ต่ำถึง +3V จึงใช้แบตเตอรี่ได้ โดยยังคงมีระดับสัญญาณลอจิกเลือกได้ทั้ง +5V และ +3.3V
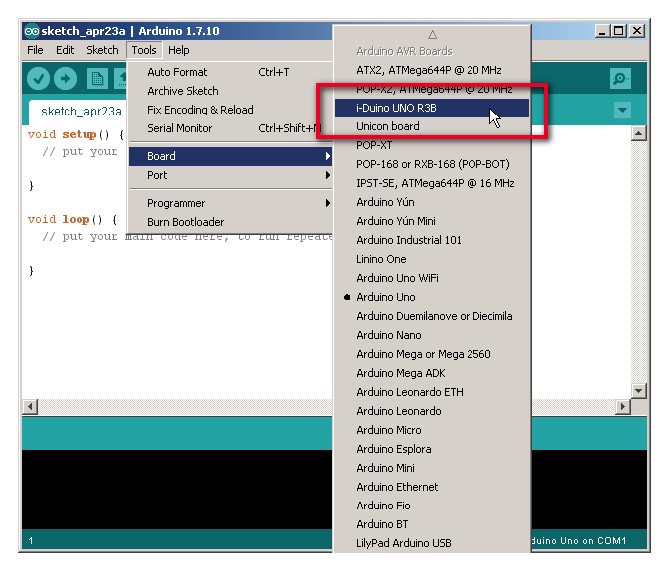
ด้านการพัฒนาโปรแกรมผู้ผลิต (INEX) ได้นำ Arduino IDE 1.7.10 จากฝั่ง arduino.org มาต่อยยอดเป็นเวอร์ชันพิเศษทำให้ใช้งานไมโครคอนโทรลเลอร์ ATmega328PB ได้เต็มความสามารถ อาจกล่าวได้ว่า นี่คือ Arduino IDE 1.7.10 รุ่นแรกที่รองรับและใช้งานได้กับ ATmega328PB ทั้งนี้เนื่องจากในขณะที่ทำบทความนี้ผู้พัฒนา Arduino IDE มาตรฐาน ทั้งทาง arduino.cc
และ arduino.org ยังไม่มีฮาร์ดแวร์ที่ใช้ชิป ATmega328PB อย่างเป็นทางการ ทำให้ไม่สามารถใช้งาน Arduino IDE รุ่นมาตรฐานกับฮาร์ดแวร์ ATmega328PB ได้อย่างเต็มประสิทธิภาพ ทาง INEX จึงได้นำ Arduino IDE ตั้งแต่เวอร์ชัน 1.7.8 มาปรับปรุงใหม่และทำการอัปเกรดตามการเปลี่ยนแปลงเวอร์ชันของ arduino.org จนถึงในขณะที่ต้นฉบับนี้เป็นเวอร์ชัน 1.7.10
นอกจากนั้นยังมีจุดต่อพอร์ตอินพุตอะนาลอกเพิ่มอีก 2 ขาคือ A6 (พอร์ต 20) กับ A7 (พอร์ต 21) และอินพุตเอาต์พุตดิจิตอลอีก 2 ขา (ขา 22 และ 23) อำนวยความสะดวกในการต่อโมดูลสื่อสารข้อมูลอนุกรมให้ง่ายขึ้นด้วยจุดต่อ Serial 1, ต่อพ่วงกับอุปกรณ์บัส I2C และ SPI ได้สะดวก
มีจุดต่อพอร์ตแบบ IDC ตัวผู้ ทำให้ใช้งานได้หลากหลายมากขึ้น
ด้านภาคจ่ายไฟ ด้วยวงจรแปลงแรงดันไฟตรงแบบ Boost และ Bulk ทำให้ใช้แหล่งจ่ายไฟได้ต่ำถึง +3V จึงใช้แบตเตอรี่ได้ โดยยังคงมีระดับสัญญาณลอจิกเลือกได้ทั้ง +5V และ +3.3V
ด้านการพัฒนาโปรแกรมผู้ผลิต (INEX) ได้นำ Arduino IDE 1.7.10 จากฝั่ง arduino.org มาต่อยยอดเป็นเวอร์ชันพิเศษทำให้ใช้งานไมโครคอนโทรลเลอร์ ATmega328PB ได้เต็มความสามารถ อาจกล่าวได้ว่า นี่คือ Arduino IDE 1.7.10 รุ่นแรกที่รองรับและใช้งานได้กับ ATmega328PB ทั้งนี้เนื่องจากในขณะที่ทำบทความนี้ผู้พัฒนา Arduino IDE มาตรฐาน ทั้งทาง arduino.cc
และ arduino.org ยังไม่มีฮาร์ดแวร์ที่ใช้ชิป ATmega328PB อย่างเป็นทางการ ทำให้ไม่สามารถใช้งาน Arduino IDE รุ่นมาตรฐานกับฮาร์ดแวร์ ATmega328PB ได้อย่างเต็มประสิทธิภาพ ทาง INEX จึงได้นำ Arduino IDE ตั้งแต่เวอร์ชัน 1.7.8 มาปรับปรุงใหม่และทำการอัปเกรดตามการเปลี่ยนแปลงเวอร์ชันของ arduino.org จนถึงในขณะที่ต้นฉบับนี้เป็นเวอร์ชัน 1.7.10
นี่คืออีกหนึ่งผลงานจากวิศวกรและผู้ผลิตคนไทยที่ควรค่าต่อการสนับสนุน และนับเป็นครั้งแรกที่ประเทศไทยได้นำเสนอความก้าวหน้าล่าสุดของการใช้งานฮาร์ดแวร์และซอฟต์แวร์ Arduino ที่ใช้ชิปใหม่และมีคุณสมบัติเหนือกว่า Arduino รุ่นมาตรฐานและดั้งเดิม
คุณสมบัติทางเทคนิคของบอร์ด iDuino UNO R3B
• เข้ากันได้กับฮาร์ดแวร์ Arduino UNO R3
• ใช้ไมโครคอนโทรลเลอร์ ATmega328PB ของ Atmel มีหน่วยความจำโปรแกรมแบบแฟลช 32 กิโลไบต์ โปรแกรมใหม่ได้ 10,000 ครั้ง มีหน่วยความจำข้อมูลอีอีพรอม 512 ไบต์ และหน่วยความจำข้อมูลแรม 1 กิโลไบต์ สัญญาณนาฬิกาหลัก 16MHz จากคริสตอล
• มีจุดต่อพอร์ต USB สำหรับอัปโหลดโปรแกรมและสื่อสารข้อมูลกับคอมพิวเตอร์
• มีสวิตช์ RESET การทำงาน
• มีจุดต่อพอร์ตตามมาตรฐานของ Arduino UNO
• มีจุดต่อแบบ IDC 3 ขา รวม 20 จุด แบ่งเป็นขาพอร์ตดิจิตอล 14 จุด และขาพอร์ตแบบดิจิตอลหรืออะนาลอก (กำหนดได้) 6 จุด
• มีจุดต่อพอร์ตที่เพิ่มขึ้นอีก 4 ขา คือ 20 ถึง 23 ซึ่งเป็นขาพอร์ตอินพุตเอาต์พุตดิจิตอลและเป็นอินพุตอะนาลอกอีก 2 ขาคือ 20/A6 และ 21/A7
• มีจุดต่อระบบบัส 2 สาย (I2C) เพื่อขยายระบบ
• มีจุดต่อพอร์ตสื่อสารข้อมูลอนุกรม SERIAL1 เป็นความสามารถที่เพิ่มขึ้นของ ATmega328PB ทำให้ใช้เชื่อมต่อกับโมดูลสื่อสารข้อมูลอนุกรมอื่นๆ ได้ง่ายขึ้น โดยไม่ต้องใช้ SERIAL0 เดิมที่ใช้งานร่วมกับชิปแปลงสัญญาณพอร์ต USB เป็น UART
• ใช้ภาคจ่ายไฟแบบสวิตชิ่งที่รับแรงดันอินพุตจากแจ๊กอะแดปเตอร์ได้ตั้งแต่ 3 ถึง 12V จึงใช้กับแบตเตอรี่ได้ และยังใช้ไฟเลี้ยงจากพอร์ต USB ได้ด้วย โดยมีจั๊มเปอร์เลือกระดับไฟเลี้ยงที่ต้องการ ปกติจะเลือกไว้ที่ +3.3V
• ตัวชิป ATmega328PB ได้รับการโปรแกรมบิตฟิวส์แบบใหม่ ทำให้รักษาข้อมูลของหน่วยความจำอีอีพรอมภายในตัวชิปไว้ได้เมื่อมีการอัปโหลดโค้ด ความสามารถนี้ไม่มีอยู่ใน Arduino UNO ดั้งเดิม
• มีความสามารถในการป้องกันการอ่านข้อมูลออกจากหน่วยความจำโปรแกรมหรือ Code protection ความสามารถนี้ไม่มีอยู่ใน Arduino UNO ดั้งเดิม
• มีความเร็วในการอัปโหลดโปรแกรมสูงกว่า Arduino UNO ดั้งเดิม
• พัฒนาโปรแกรมด้วย Arduino IDE 1.7.10 เวอร์ชันพิเศษที่ทาง INEX ได้ทำการปรับปรุงขึ้นใหม่เป็นพิเศษให้รองรับกับไมโครคอนโทรลเลอร์ ATmega328PB
ดาวน์โหลดโปรแกรมที่ www.inex.co.th
สนใจหาซื้อมาใช้ได้ที่ www.inex.co.th หรือซื้อชุด StarterKit ได้ที่ Lazada