


“เชื่อว่าคุณคงเคยเข้าไปใช้บริการร้านสะดวกซื้อ เมื่อเดินเข้าไป จะได้ยินเสียงติ๊งต่อง แจ้งการเข้ามาของคุณๆ ให้พนักงานในร้านทราบ และเสียงทักทาย ก็จะดังตามมา ทั้งที่พวกเขาอาจไม่ได้เห็นคุณด้วยซ้ำ เค้ารู้ได้อย่างไร หน้าที่นี้ตกเป็นของตัวตรวจจับการเคลื่อนไหวครับ แล้วมันทำงานอย่างไร ตามผมมาครับ จะพาไปรู้จัก”
ความเคลื่อนไหวตรวจจับได้อย่างไร ?
สิ่งมีชีวิตไม่ว่าจะเป็นมนุษย์หรือสัตว์เลือดอุ่นในภาวะที่ยังมีชีวิตอยู่ จะมีการกระจายพลังงานความร้อนออกมาจากตัวเองในรูปของการแผ่รังสีอินฟราเรดอยู่ตลอดเวลา โดยจะมีปริมาณมากหรือน้อยขึ้นอยู่กับสภาพของร่างกายในขณะนั้น เมื่อมีการเคลื่อนไหวปริมาณของการแผ่รังสีก็จะเปลี่ยนแปลง รังสีอินฟราเรดจากมนุษย์หรือสัตว์เลือดอุ่นที่มีระดับความเข้มสูงสุดจะมีความยาวคลื่นประมาณ 9.4 ไมโครเมตร
ตัวตรวจจับความเคลื่อนไหวของสิ่งมีชีวิตหรือที่เรียกว่า โมชั่นเซนเซอร์ (motion sensor) ที่ได้รับความนิยมและใช้งานง่ายคือ ตัวตรวจจับแบบอินฟราเรด ซึ่งใช้หลักการตรวจจับที่เรียกว่า ไพโรอิเล็กตริก (pyro-electric) อันเป็นการตรวจจับการแผ่รังสีอินฟราเรด หากระดับของการแผ่รังสีไม่เปลี่ยนแปลง แสดงว่า สิ่งมีชีวิตที่ต้องการตรวจจับนั้นไม่มีการเคลื่อนไหว แต่ถ้าหากมีการเคลื่อนไหวเกิดขึ้น ระดับของการแผ่รังสีอินฟราเรดจะเปลี่ยนแปลง จึงเรียกตัวตรวจจับแบบนี้ว่า PIR (Passive InfraRed sensor)
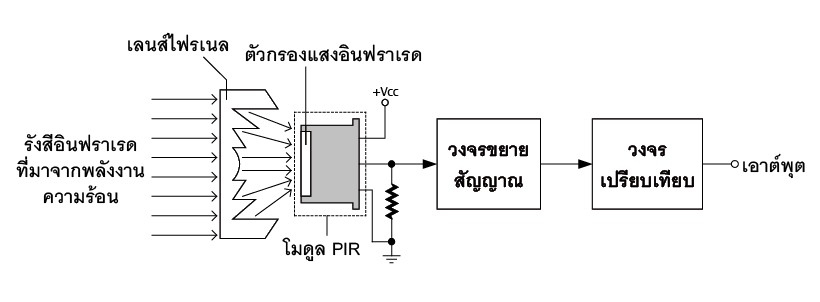
รูปที่ 1 ไดอะแกรมการทำงานของตัวตรวจจับการแผ่รังสีอินฟราเรดซึ่งใช้ตรวจจับความเคลื่อนไหว
ในรูปที่ 1 เป็นไดอะแกรมแสดงหลักการทำงานพื้นฐานของตัวตรวจจับพลังงานความร้อนจากมนุษย์หรือสัตว์เลือดอุ่น เมื่อเกิดการเคลื่อนไหวทำให้เกิดการแผ่รังสีอินฟราเรดขึ้น รังสีจะถูกรวมหรือโฟกัสไปยังตัวตรวจจับหลักโดยใช้เลนส์แบบพิเศษที่เรียกว่า เลนส์ไฟรเนลหรือเฟรสนัล (Fresnel lens) จากนั้นตัวตรวจจับหลักจะทำการขยายสัญญาณแล้วส่งไปยังวงจรเปรียบเทียบเพื่อสร้างสัญญาณเอาต์พุตต่อไป
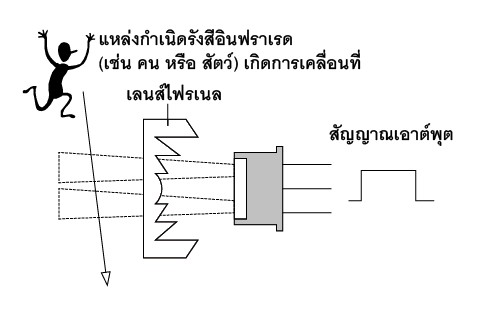
รูปที่ 2 แสดงการทำงานของโมดูล PIR เมื่อนำมาใช้ในการตรวจจับความเคลื่อนไหว
ในรูปที่ 2 แสดงสถานการณ์ที่แหล่งกำเนิดรังสีอินฟราเรด (อาจเป็นมนุษย์หรือสัตว์เลือดอุ่น) เกิดการเคลื่อนไหวภายในระยะทำการของตัวตรวจจับ จะทำให้โมดูลตรวจจับ PIR ตรวจจับพบการแผ่รังสีอินฟราเรดที่แตกต่างกัน จึงให้สัญญาณเอาต์พุตเป็นลอจิกสูง (high) อยู่ชั่วขณะเมื่อตรวจจับพบการเคลื่อนไหว จากนั้นกลับมาเป็นลอจิกต่ำ (low) จนกว่าจะตรวจจับพบการเปลี่ยนแปลงของระดับรังสีอินฟราเรดอีกครั้ง
เลนส์ไฟรเนล
เลนส์ไฟรเนลเป็นเลนส์แบบพิเศษที่ได้รับการค้นคิดจากนักฟิสิกส์ชาวฝรั่งเศสชื่อ ออกัสติน ชอง ไฟรเนล (Augustin-Jean Fresnel) โดยแนวคิดของเลนส์แบบนี้คือ เป็นเลนส์แบบขั้นบันไดที่ยอมให้แสงผ่านได้มากและจากทุกทิศทาง ดังมีโครงสร้างตามรูปที่ 3
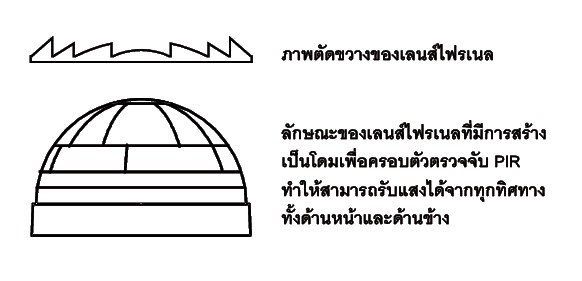

รูปที่ 3 โครงสร้างและหน้าตาของเลนส์ไฟรเนลซึ่งนำมาใช้ในโมดูล PIR
ทั้งนี้เนื่องจากตัวเลนส์ได้ถูกสร้างขึ้นโดยลดเนื้อวัสดุในส่วนที่ไม่มีผลกับการหักเหของแสงลงไป ทำให้สามารถทำเลนส์ขนาดใหญ่ที่มีน้ำหนักเบาได้ เดิมทีเลนส์ไฟรเนลนี้ได้รับการออกแบบเพื่อให้นำมาใช้ในการกระจายในประภาคาร เพื่อให้สามารถมองเห็นประภาคารได้จากระยะไกล ต่อมาได้มีการพัฒนาให้มีขนาดเล็กลง แล้วนำมาครอบหลอดไฟเพื่อทำเป็นตะเกียง ทำให้ตะเกียง สามารถส่องแสงได้สว่างและมองเห็นได้จากระยะไกล ดังรูปที่ 4

รูปที่ 4 ตัวอย่างตะเกียงที่ใช้เลนส์ไฟรเนลในการเพิ่มอัตราการส่องสว่าง
แต่เมื่อนำมาใช้ในโมดูลตรวจจับ PIR ตัวเลนส์ไฟร เนลจะถูกใช้งานในลักษณะกลับกันคือ ใช้เลนส์ไฟรเนลในการรวมแสงเข้ามาจากทุกทิศทางเพื่อโฟกัสลงไปยังส่วนตรวจจับแสงอินฟราเรดของโมดูลตรวจจับ PIR เพื่อให้การตรวจจับการเปลี่ยนแปลงของรังสีอินฟราเรดมีความไวสูง
คุณสมบัติของโมดูลตรวจจับ ZX-PIR
อุปกรณ์ตรวจจับความเคลื่อนไหวที่นำมาเสนอเพื่อเป็นตัวอย่างในที่นี้คือ โมดูล ZX-PIR ซึ่งใช้ตัวตรวจจับที่เรียกว่า PIR ซึ่งสามารถตรวจจับการแผ่รังสีอินฟราเรด โดยทำงานร่วมกับเลนส์ชนิดพิเศษที่เรียกว่า เลนส์ไฟรเนล ซึ่งทำหน้าที่รวมรังสีอินฟราเรดที่ตัวตรวจจับได้รับ เพื่อส่งผ่านไปยังตัวตรวจจับ PIR เพื่อทำการประมวลผลต่อไป ในรูปที่ 5 แสดงลักษณะทางกายภาพของโมดูล ZX-PIR และขาต่อใช้งาน
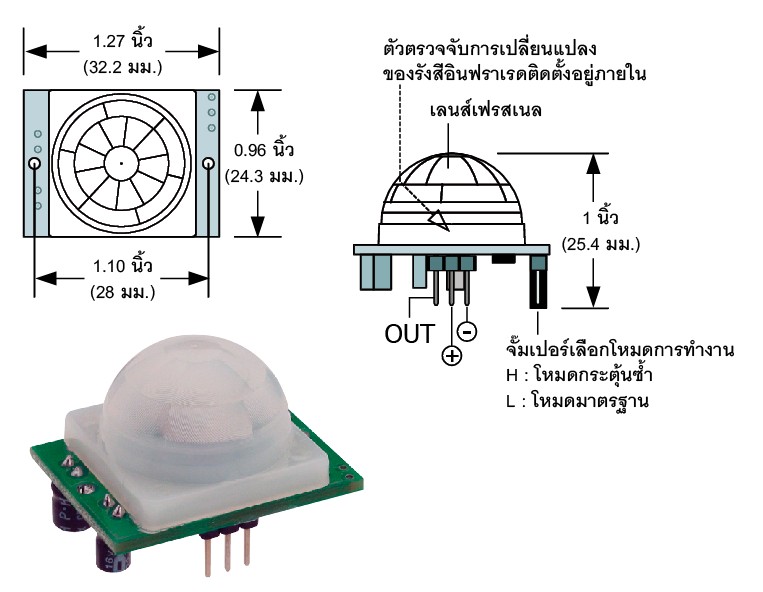
รูปที่ 5 แสดงขนาด, ส่วนประกอบและการจัดขา และหน้าตาของโมดูล ZX-PIR
คุณสมบัติทางเทคนิคที่ควรทราบมีดังนี้
• ระยะการตรวจจับสูงสุด 20 ฟุต
• เมื่อตรวจพบความเคลื่อนไหวจะให้แรงดันเอาต์พุตที่สภาวะสูงที่ขาเอาต์พุต
• ใช้เวลาในการปรับตัวเพื่อตรวจจับการเปลี่ยนแปลงช่วง 10 ถึง 60 วินาทีหลังจากได้รับไฟเลี้ยง
• ใช้ไฟเลี้ยงในย่าน +3.3 ถึง +5V กระแสไฟฟ้าน้อยกว่า 100 mA
การใช้งาน
เนื่องจากเอาต์พุตของโมดูล ZX-PIR เป็นสัญญาณดิจิตอลที่มีสองสถานะคือ ลอจิกสูง หรือ “1” และลอจิกต่ำหรือ “0” จึงสามารถเชื่อมต่อกับขาพอร์ตดิจิตอลของไมโครคอนโทรลเลอร์ได้ทุกตระกูล โดยต้องกำหนดให้ขาพอร์ตที่เชื่อมต่อนั้นเป็นอินพุตดิจิตอลก่อน และไม่ต้องต่อตัวต้านทานพูลอัปที่ขาพอร์ตของไมโครคอนโทรลเลอร์ซึ่งนำมาต่อกับโมดูล ZX-PIR ดังรูปที่ 6 เนื่องจากเอาต์พุตของ ZX-PIR ไม่สามารถจ่ายกระแสได้มากพอที่จะควบคุมให้ขาพอร์ตเป็นลอจิก “0” ในภาวะที่ไม่สามารถตรวจจับการเคลื่อนไหวได้ หากมีการต่อตัวต้านทานพูลอัปที่ขาพอร์ตของไมโครคอนโทรลเลอร์

รูปที่ 6 ตัวอย่างการเชื่อมต่อโมดูล ZX-PIR กับไมโครคอนโทรลเลอร์
ที่ไมโครคอนโทรลเลอร์ต้องเขียนโปรแกรมเพื่อตรวจจับการเปลี่ยนแปลงทางลอจิกของขาพอร์ตที่ต่อกับโมดูล ZX-PIR


คลิกเพื่อชมตัวอย่างการใช้ PIR กับหุ่นยนต์เดินตามเส้น iBEAM
จากข้อมูลที่นำเสนอมาทั้งหมดจะเห็นได้ว่า การตรวจจับความเคลื่อนไหวด้วยโมดูล PIR นี้ ความไวหรือประสิทธภาพในการทำงานจะขึ้นกับเลนส์ไฟรเนลเป็นสำคัญ ทางด้านการนำไปใช้งานนั้นจะเห็นได้ว่าง่ายมาก หากแต่ ต้องให้ความใส่ใจในด้านการติดตั้งตัวตรวจจับในตำแหน่งที่เหมาะสม
สนใจซื้อหามาใช้งานได้ที่ www.inex.co.th