เมื่อตุ๊กตาขี้กลัวตัวน้อยต้องคอยซ่อนตัวอยู่ในกล่องตามลำพัง
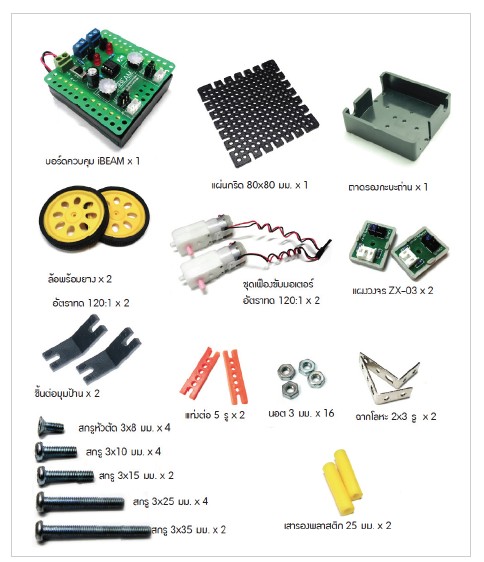
เตรียมอุปกรณ์
การจะทำให้โครงงานของเล่นให้ดูมีชีวิตชีวานั้น แน่นอนล่ะครับว่าต้องใช้ระบบสมองกลหรือไมโครคอนโทรลเลอร์เข้าช่วยประมวลผล แต่จะให้ง่ายและใช้งานได้ทันที ก็เป็นต้องชุด Robo-Circle3S แต่ต้องเพิ่มอุปกรณ์อีกเล็กน้อย มาดูรายการอุปกรณ์กันเลยแผงวงจร i-BOX3S มอเตอร์ BO2 อัตราทด 120:1 มอเตอร์ BO1 2 เอาต์พุต อัตราทด 120:1 แผงวงจร ZX-SOUND แผงวงจร ZX-POTH (ปัจจุบันมีจำหน่ายเป็นรุ่น ZX-POTV ผู้อ่านต้องดัดแปลงเล็กน้อย) ล้อกลม พร้อมยาง พลาสวูดขนาด A4 จำนวน 1 แผ่น กะบะถ่าน AA 4 ก้อน
การสร้าง ประดิษฐ์ส่วนกลไกการเคลื่อนที่
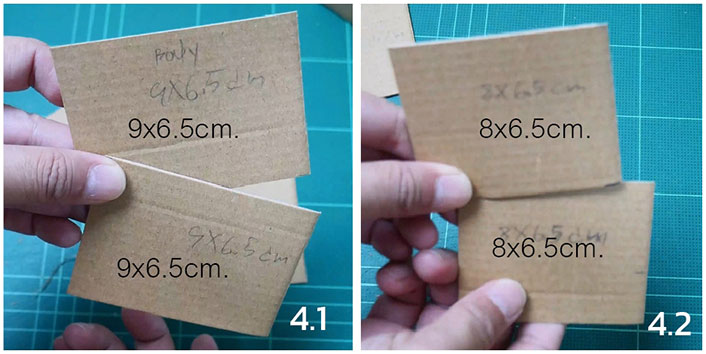
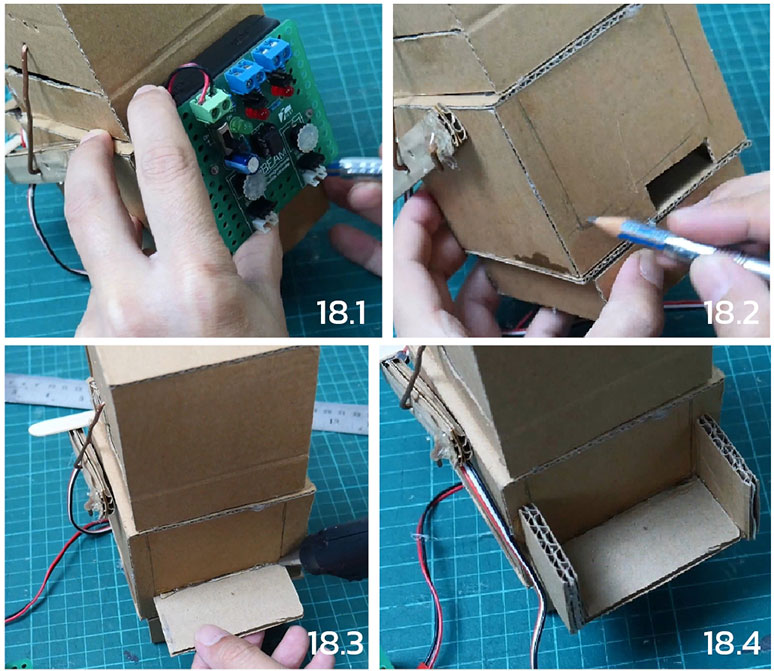
(2) นำชุดแผ่นฐานติดตั้งลงในกล่อง ใช้ดินสอวาดแนวของล้อเอาไว้ จากน้ันใช้คัตเตอร์ตัดเป็นร่องสำหรับให้ล้อโผล่ลงไปด้านล่างของกล่องได้ สำหรับขนาดของช่องควรเจาะให้กว้างกว่าขอบล้อเล็กน้อยเพื่อความสะดวกในการติดตั้งดังรูปที่ 2.3 ถึง 2.5 เมื่อเจาะเสร็จแล้วติดตั้งแผ่นฐานลงไปยึดด้วยปืนยิงกาวดังรูปที่ 2.6 สุดท้ายแกะเทปโฟมสองหน้าที่ด้านบนของแผ่นฐานออกแล้วนำชุดเฟืองขับมอเตอร์ BO2 มาแปะลงไป โดยให้ตำแหน่งของล้ออยู่กึ่งกลางของช่องที่เราเจาะไว้เมื่อติดตั้งแล้วจะเห็นว่าล้อโผล่ออกมาเพียงเล็กน้อยเท่านั้นดังรูปที่ 2.8 ทดลองวางกล่องลงบนพื้น กล่องจะแนบกับพื้นเกือบสนิทและดูไม่ออกว่าด้านล่างมีล้ออยู่
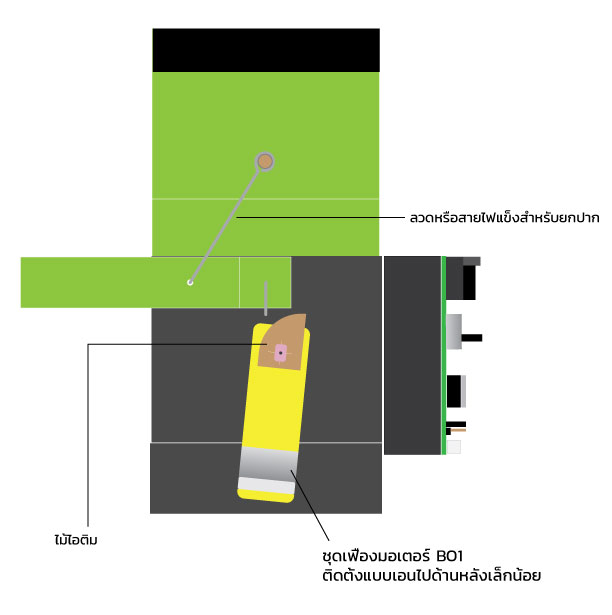
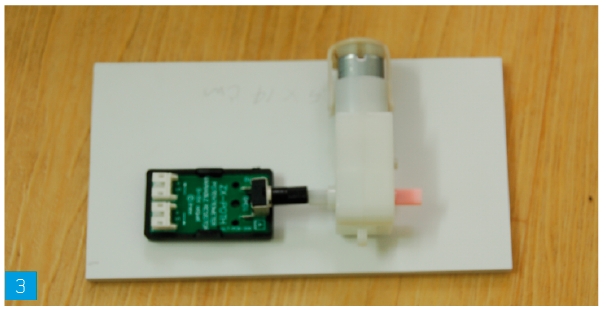
(3) ตัดแผ่นพลาสวูดขนาด 7.5×14 ซม. เพื่อใช้เป็นแผ่นฐานติดตั้งชุดเฟืองขับมอเตอร์ BO1 และแผงวงจร ZX-POTH จากนั้นนำชุดเฟืองขับมอเตอร์ BO1 และแผงวงจร ZX-POTH มาจัดวาง โดยตำแหน่งการวางนี้ต้องให้แกนหมุนของเฟืองขับมอเตอร์เยื้องมาทางขวา ดังรูปที่ 3 จะเยื้องมากน้อยแค่ไหนขึ้นอยู่กับขนาดของตัวตุ๊กตาที่นำมาใช้ เพื่อหลีกการชนตัวตุ๊กตาที่เราจะติดตั้งในขั้นตอนสุดท้าย เมื่อวางได้ตำแหน่งที่ต้องการแล้วให้ใช้ปืนยิงกาวยึดชุดเฟืองขับมอเตอร์เอาไว้ ส่วนแผงวงจร ZX-POTH ยังไม่ต้องยึด
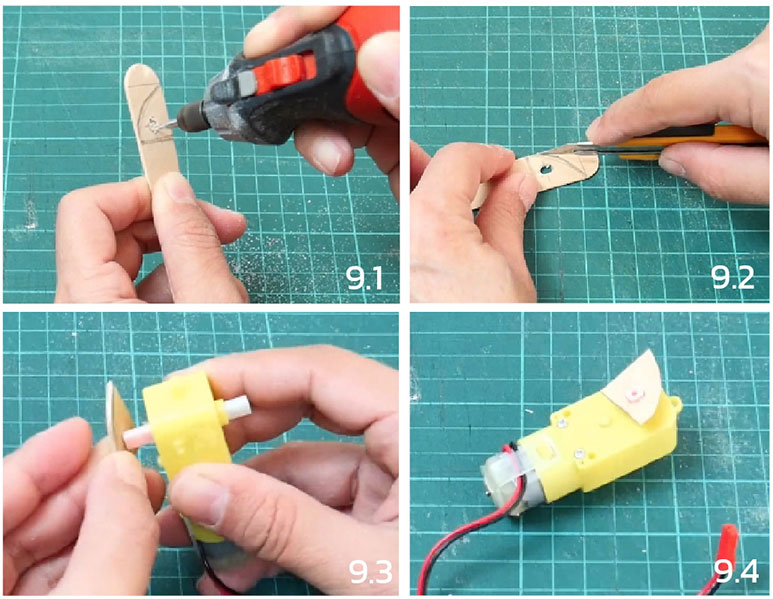
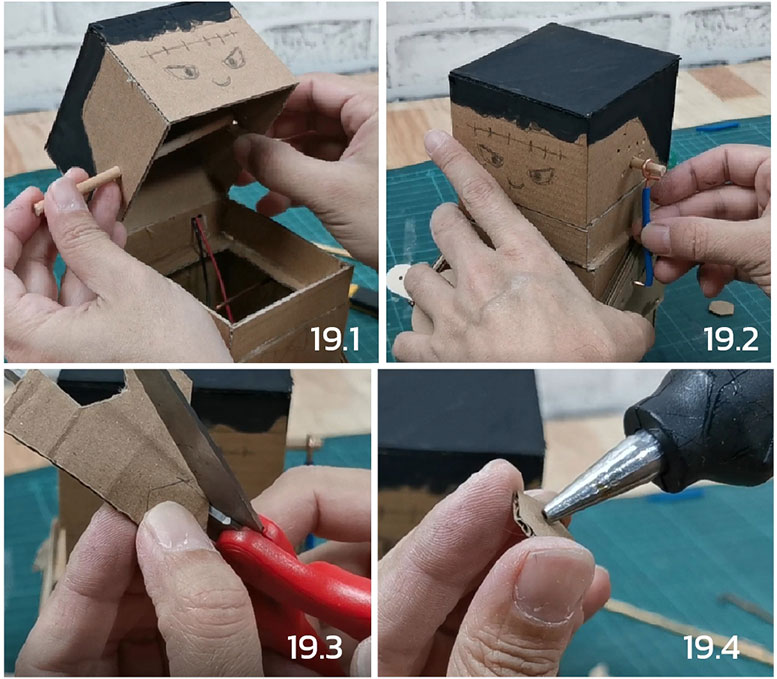
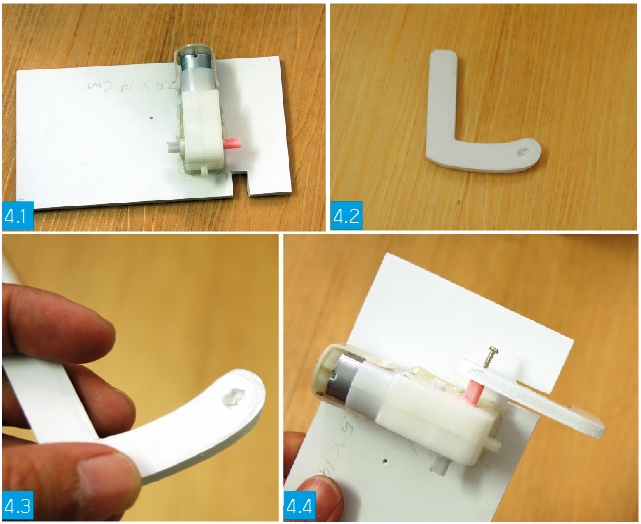
(4) ตัดแผ่นฐานเป็นร่องกว้าง 7 มม. ให้ตรงกับแนวแกนสีชมพูของชุดเฟืองขับมอเตอร์ดังรูปที่ 4.1 จากนั้นตัดเศษพลาสวูดให้ได้รูปทรงรูปตัว L ดังรูปที่ 4.2 สำหรับใช้เป็นแขนดันฝากล่องส่วนแขนจะยาวมากหรือน้อยขึ้นกับว่าต้องให้กล่องเปิดมากน้อยเพียงใด จากนั้นนำส่วนปลายด้านหนึ่งไปกดเข้ากับแกนของชุดเฟืองขับมอเตอร์ให้เป็นร่องแล้วใช้คัตเตอร์ค่อยๆ เซาะให้ร่องลึกลงไปประมาณ 1/3 ของความหนาพลาสวูดดังรูปที่ 4.3 แล้วเจาะรูตรงกึ่งกลางร่องใช้สกรูเกลียวปล่อยตัวเล็กขันยึดชิ้นส่วนแขนเข้ากับแกนของชุดเฟืองขับมอเตอร์ดังรูปที่ 4.4 ชุดส่วนแขนจะต้องลงร่องที่บากไว้ได้
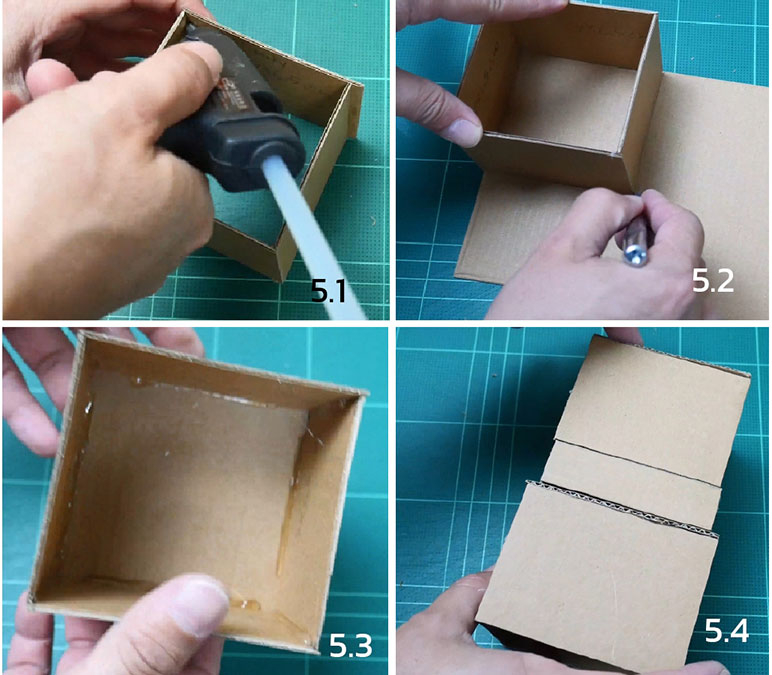
(5) ตัดพลาสวูดขนาด 2×10 ซม. จำนวน 4 ชิ้น สำหรับใช้เป็นขาติ้งตั้งชุดเฟืองขับมอเตอร์ BO1 และแขนดันฝากล่อง จากนั้นใช้ปืนยิงกาวติดกับแผ่นฐานดังรูปที่ 5.2 ตัดแผ่นพลาสวูดขนาด 9×10 ซม. สำหรับบังคับตัวตุ๊กตาให้ขึ้นลงในช่องและยังเพิ่มความแข็งแรงให้กับชุดแผ่นฐานด้วย แล้วใช้ปืนยิงกาวติดเข้ากับแผ่นฐานดังรูปที่ 5.3
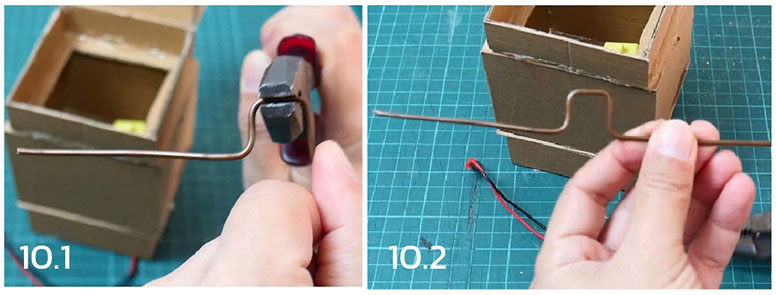
(6) นำแผงวงจร ZX-POTH มาติดตั้งด้วยปืนยิงกาวแล้วใช้ท่อหดเป็นตัวเชื่อมระหว่างแกนสีขาวของชุดเฟืองขับมอเตอร์ BO1 เข้ากับแกนของแผงวงจร ZX-POTH ดังรูปที่ 6.2 เพื่อให้ ZX-POTH เป็นตัวกำหนดองศาการหมุน
โดยก่อนหุ้มท่อหดให้หมุนแขนดันฝากล่องลงมาให้ระดับของปลายแขนต่ำกว่าแผ่นฐานดังรูปที่ 6.3 แล้วหมุนแกนของ ZX-POTH ตามเข็มนาฬิกาจนเกือบสุดแล้วจึงหุ้มท่อหดโดยใช้ความร้อนเป่า
(7) นำสายไฟเส้นเล็กมาบัดกรีเชื่อมกับขั้วของสวิตช์ RUN ของแผงวงจร i-BOX3S ดังรูปที่ 7
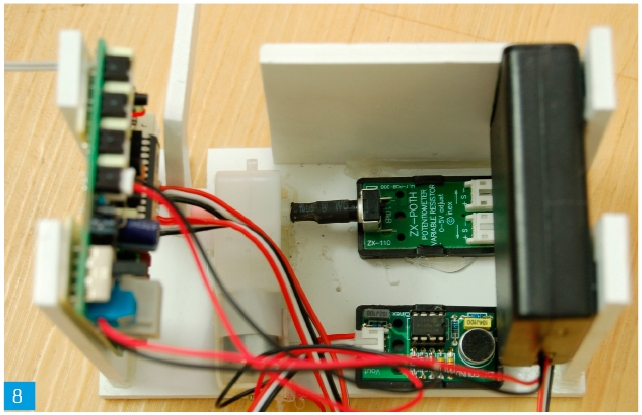
(8) นำแผงวงจร i-BOX3S , แผงวงจร ZX-SOUND และกะบะถ่าน AA 4 ก้อนพร้อมบรรจุแบตเตอรี่ติดตั้งกับชุดฐานดังรูปที่ 8 จากนั้นเชื่อมต่อสายของแผงวงจรและชุดเฟืองขับมอเตอร์เข้ากับแผงวงจร i-BOX3S ดังนี้
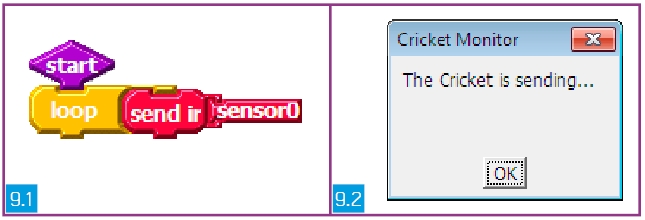
(9) วางเครื่องมือการประกอบแล้วมาเริ่มเขียนโปรแกรมกันก่อน เพราะหากประกอบจนเสร็จแล้วค่อยมาเขียนทีหลังจะทำให้การปรับแต่งยุ่งยาก เริ่มจากหาค่าตำแหน่งเปิดปิดฝากล่องจาก ZX-POTH และค่าความดังเสียง จาก ZX-SOUND โดยเสียบสาย UCON-200 เปิดสวิตช์แผงวงจร i-BOX3S เปิดโปรแกรม Logo-Blocks ขึ้นมารับค่าจาก ZX-SOUND ด้วยคำสั่ง send ir แล้วเปลี่ยนบล็อกตัวเลขสีน้ำเงินเป็นบล็อกชื่อ sensor ดังรูปที่ 9.1 ดับเบิ้ลคลิกเพื่อเลือกตำแหน่งของจุดต่อตัวตรวจจับที่ต้องการรับค่า ดาวน์โหลดโค้ดนี้ลง i-BOX3S ไปที่เมนู Projects เลือก Cricket Monitor จะปรากฏหน้าต่างขึ้นมาดังรูปที่ 9.2 เมื่อกดสวิตช์ RUN ที่ i-BOX3S จะปรากฏตัวเลขค่าที่รับมาจากแผงวงจรที่เรากำหนดทันที
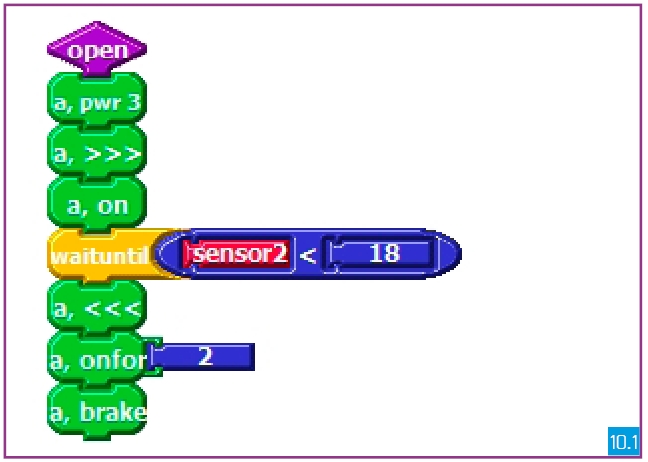
(10) เมื่อได้ค่าตัวเลขจากแผงวงจร ZX-SOUND และ ZX-POTH มาแล้วเราก็สามารถเขียนโปรแกรมอย่างง่ายๆ ได้ด้วยซอฟต์แวร์ Logo-Blocks แต่เพื่อให้การเขียนโปรแกรมของเราง่ายขึ้นจึงต้องสร้างโปรแกรมย่อยขึ้นมา จะเห็นว่ามีโปรแกรมย่อยอยู่ทั้งหมด 5 ส่วนได้แก่
(10.1) open ส่วนควบคุมการเปิดปิดฝากล่อง
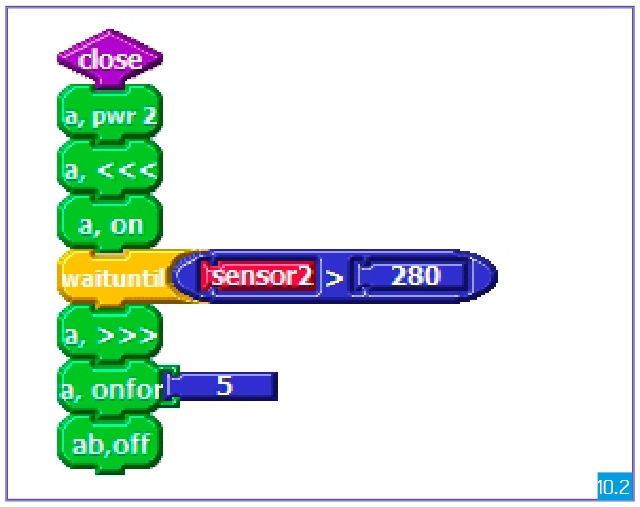
(10.2) close ควบคุมการปิดฝากล่อง
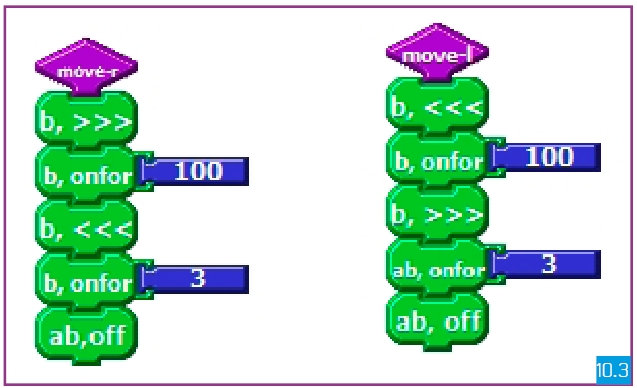
(10.3) move-r และ move-l
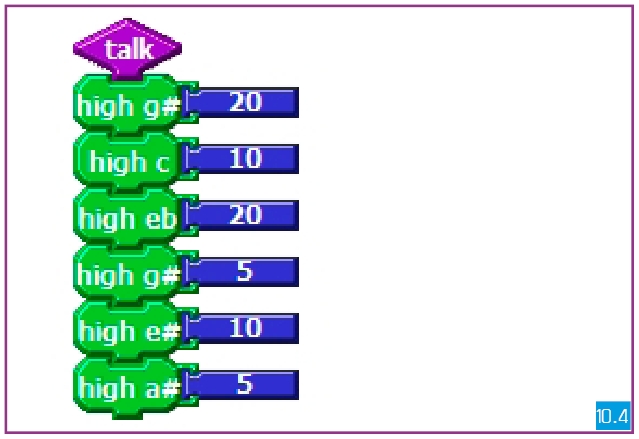
(10.4) talk
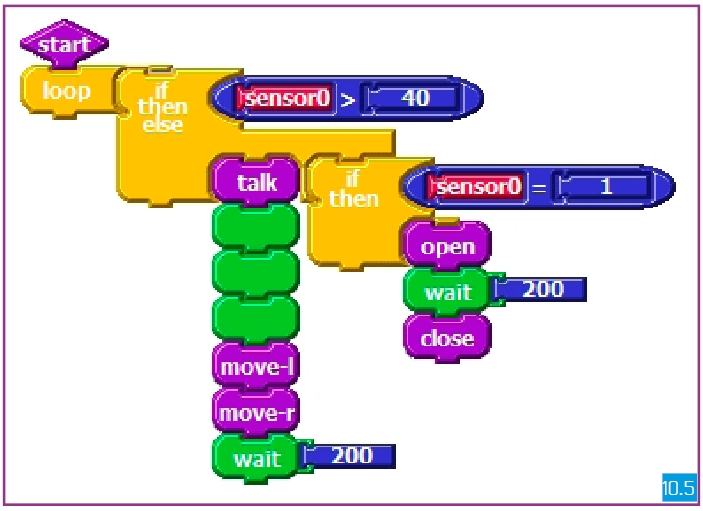
เมื่อได้โปรแกรมย่อยครบทั้ง 5 ส่วนแล้ว ก็มาเขียนโปรแกรมหลักสำหรับการควบคุมทั้งระบบกันดังรูปที่ 10.5
การทำงานของโปรแกรมหลักเริ่มจากใช้คำสั่ง loop เพื่อวนรอบการทำงานทั้งหมด ใช้คำสั่ง if then else กำหนดเงื่อนไขหลักเป็น 2 กรณี คือ
สาเหตุที่ต้องมีการสร้างเงื่อนไขแบบค่าตายตัวเท่ากับ 1 เท่านั้น ก็เพราะว่าค่าที่ได้จาก ZX-SOUND มีความไวมาก และผันผวนพอสมควรจึงต้องกำหนดค่าไว้ที่เกือบต่ำสุดเพราะว่าต้องการให้เสียงภายนอกเงียบจริงๆ จึงค่อยสั่งให้เปิดฝา หากไม่กำหนดส่วนนี้ โอกาสที่โปรแกรมจะเข้าสู่เงื่อนไขแรกจะเกิดขึ้นน้อยมากและทำให้ฝาของกล่องเปิดปิดตลอดเวลา
เมื่อการตั้งค่าและปรับแต่งเรียบร้อยแล้วก็ทำการโปรแกรมลงใน i-BOX3S ได้เลย ต่อไปก็ลงมือประกอบร่างกันต่อ
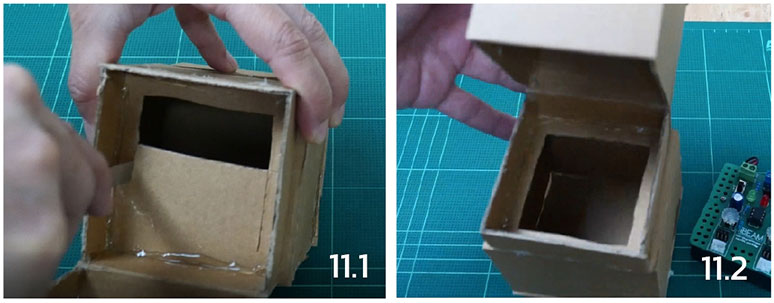
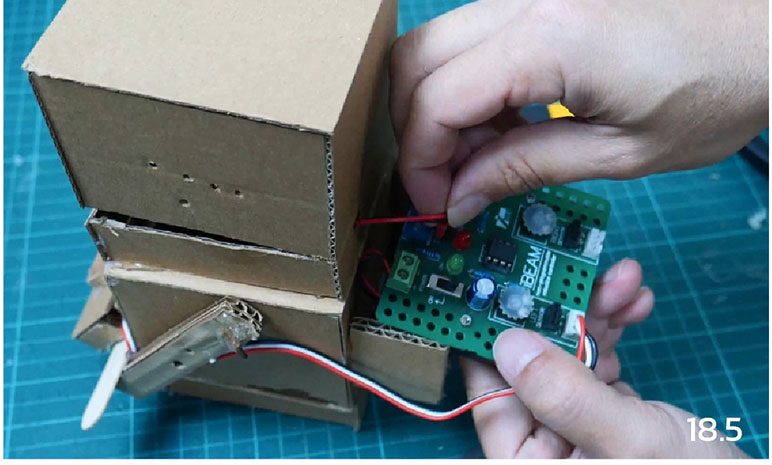
(11) ยกฝากล่องขึ้นประมาณ 1 ซม. ใช้ดินสอขีดเส้นทำเครื่องหมายเอาไว้ ตัดเศษพลาสวูดขนาด 0.5×14 ซม. ใช้ปืนยิงกาวติดแท่งพลาสวูดเข้ากับด้านหลังกล่องดังรูปที่ 11.1 จากนั้นนำฝากล่องมาครอบแล้วใช้เทปใสแปะฝากล่องเข้ากับแท่งพลาสวูดดังรูปที่ 11.2
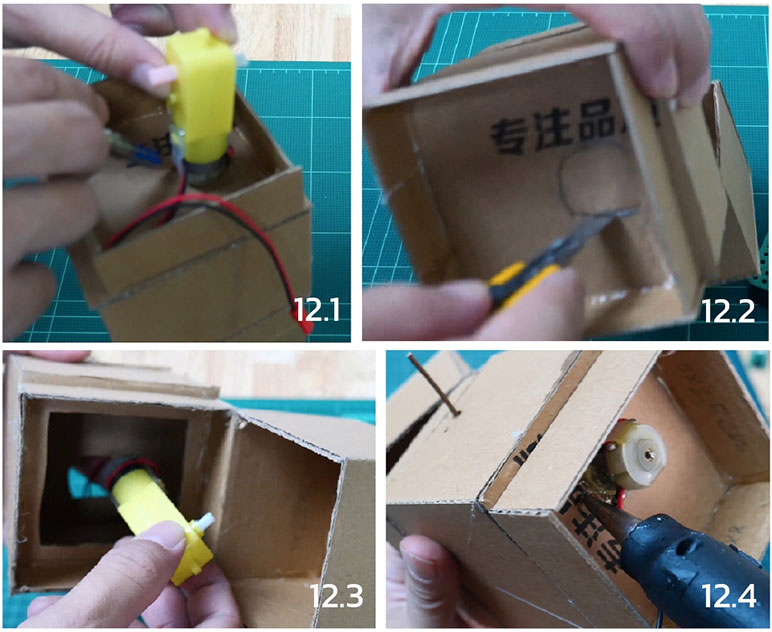
(12) ทำสวิตช์ RUN แบบง่ายๆ โดยเจาะรูกึ่งกลางของด้านหลังกล่องให้สายไฟเส้นเล็กที่ต่อพ่วงกับสวิตช์ RUN ของแผงวงจร i-BOX3S โผล่ออกมาได้ดังรูปที่ 12.1 แล้วยึดสายไฟด้วยปืนยิงกาวดังรูปที่ 12.2 ใช้เทปโฟมสองหน้าอย่างหนาแปะขนาบสองข้างของสายไฟดังรูปที่ 12.3
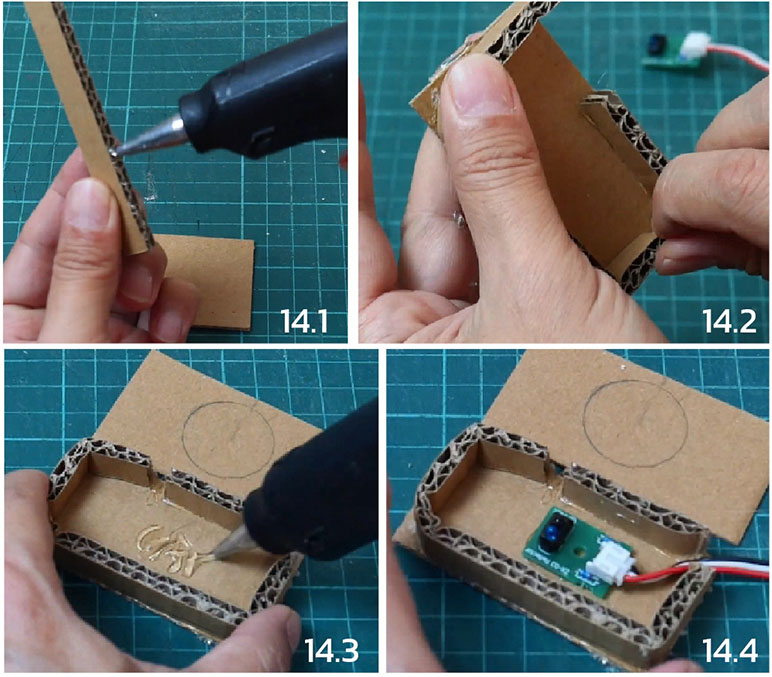
(13) ตัดกระดาษแข็งสีอะไรก็ได้ตามต้องการให้มีขนาดกว้างและยาวกว่าเทปโฟมสองหน้าและสายไฟที่เตรียมไว้จากขั้นตอนที่แล้ว เตรียมกระดาษตะกั่วให้มีความกว้างประมาณ 1/3 ของกระดาษแข็งดังรูปที่ 13.1 แล้วแปะกระดาษตะกั่วเข้ากับกระดาษแข็งด้วยเทปกาวสองหน้าอย่างบางดังรูปที่ 13.2 เวลาใช้งานก็เพียงกดส่วนล่างของกระดาษแข็งที่ติดกระดาษตะกั่วเอาไว้ จะทำให้กระแสไฟฟ้าไหลผ่านได้
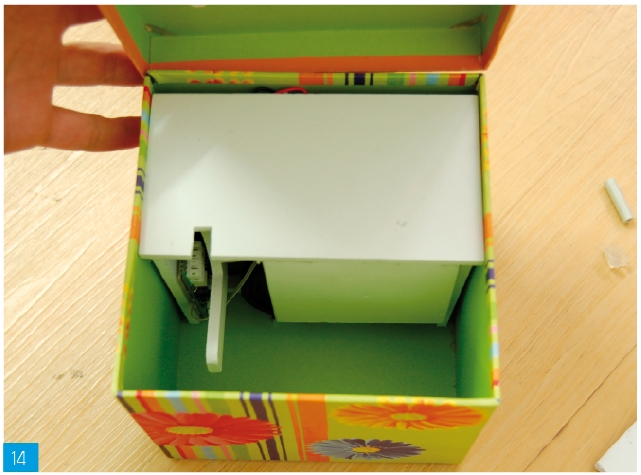
(14) ติดตั้งอุปกรณ์ทุกชิ้นลงในกล่องให้เรียบร้อยดังรูปที่ 14 ทดลองเปิดปิดฝากล่องเข้าออก ฝากล่องต้องเปิดปิดได้สะดวกไม่ติดขัดแม้แต่นิดเดียว ก็เป็นอันใช้ได้
(15) นำตุ๊กตากระดาษที่เตรียมไว้มาติดตั้ง ในที่นี้ผมใช้ตุ๊กตากระดาษ DARwin-OP ที่ทาง INEX และ TPE จัดทำขึ้นสำหรับแจกลูกค้า โดยใช้เทปใสแปะส่วนหัวของตุ๊กตาเข้ากับฝากล่องด้านในดังรูปที่ 15.1 เพียงเท่านี้ก็ได้ของขวัญสุดพิเศษที่ไม่มีขายที่ไหนหรือจะเอาไว้ให้เจ้าเหมียวที่บ้านเล่นก็ยัง
การใช้งาน
เอาล่ะครับคราวนี้ก็จะได้มีของขวัญน่ารักๆ เอาไว้สร้างความประหลาดใจให้เด็กๆ หรือคนพิเศษของคุณกันแล้ว ทั้งภูมิใจ และที่สำคัญไม่เหมือนใครแน่นอน ลองสร้างตามกันดูนะครับ
เรื่องที่คุณอาจสนใจ