


เมื่อวันที่ 23 มิถุนายน 2566 ศ.ดร.สมฤกษ์ จันทรอัมพร รองอธิการบดีฝ่ายวิจัยและพัฒนาเทคโนโลยีสารสนเทศ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าพระนครเหนือ (มจพ.) เป็นประธานพิธีส่งมอบ “ยานใต้น้ำไร้คนขับเพื่อตรวจสอบแผงผลิตไฟฟ้าลอยน้ำ” ให้แก่ คุณประเวทย์ เกิดวัดท่า ผู้อำนวยการฝายบำรุงรักษาเครื่องจักรกล การไฟฟ้าฝ่ายผลิตแห่งประเทศไทย (กฟผ.) เป็นผู้รับมอบ โดยมี รศ.ดร.รามิล เกศวรกุล หัวหน้าโครงการวิจัย กล่าวรายงาน ณ ห้องประชุมวิจิตรวาที คณะวิศวกรรมศาสตร์ มจพ.
ทั้งนี้โครงการวิจัยพัฒนายานได้น้ำไร้คนขับมีวัตถุประสงค์เพื่อออกแบบ และสร้างยานใต้น้ำที่สามารถตรวจสอบสภาพทุ่นลอยน้ำและทุ่นใต้น้ำของแผงผลิตไฟฟ้าได้ อีกทั้งประยุกต์ใช้เทคโนโลยีการประมวลผลภาพประเภทตัวกรองสัญญาณเพื่อใช้ในการตรวจสอบ และประเมินความเสียหายเบื้องต้น
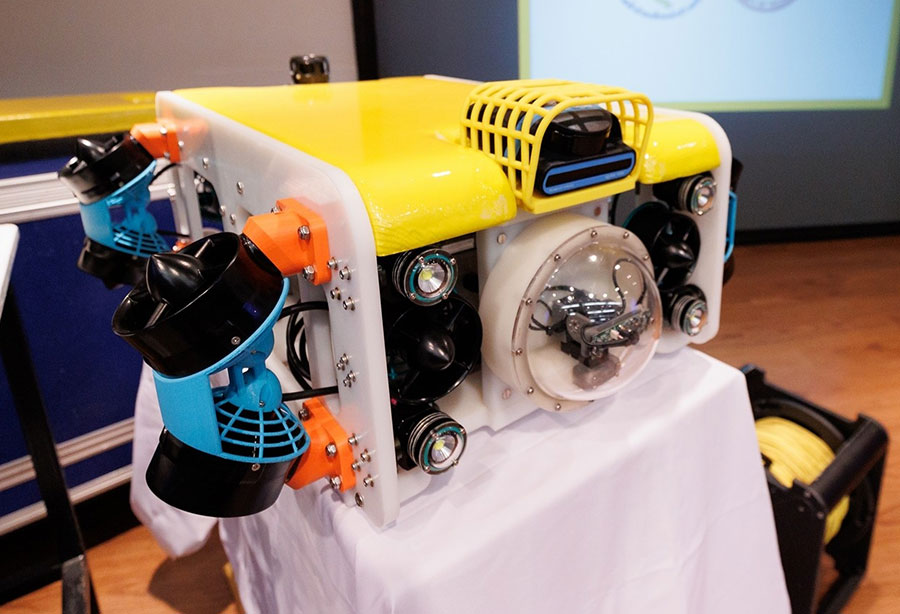
การดำเนินโครงการวิจัย การออกแบบและสร้างพลศาสตร์ของไหลและสร้างระบบขับเคลื่อนของยาน ให้ตัวยานทรงตัวได้ขณะลอยอยู่ในน้ำ โดยมีชุดขับดันทั้งหมด 12 ชุด ทำงานอย่างอิสระ โดยมิติของยานใต้น้ำไร้คนขับ มีตัวถังกว้าง 400 มิลลิเมตร ยาว 700 มิลลิเมตร สูง 300 มิลลิเมตร ระบบถ่ายภาพและบันทึกวีดีโอ การประมวลผล ติดตั้งด้านหน้าหุ่นยนต์ โดยกล้องมีความละเอียด 2 ล้านพิกเซล พร้อมบันทึกวีดีโอระดับ RGB และมีไฟช่วยการมองเห็น ยานสามารถสำรวจในน้ำความลึกไม่น้อยกว่า 25 เมตร ระยะทางไม่น้อยกว่า 250 เมตร โดยติดตั้งระบบกำหนดตำแหน่งบนโลก (USBL-Seatrac X150 และ X010) ระบบตรวจจับระยะด้วยเสียง (Multibeam sensor – Blueprint Subsea รุ่น Oculus M750D) รวมทั้งระบบตรวจจับความเร็วใต้น้ำ
(DVL-A50) การขับเคลื่อนระยไกล ถ่ายทอดภาพการปฏิบัติงานใต้น้ำแบบใช้สายสัญญาณโดยระบบไฟส่องสว่างใต้น้ำ ซึ่งได้ทดสอบระบบการทำงานแบบไร้สายสัญญาณใต้ของยานใต้น้ำ ณ โรงไฟฟ้าพลังงานแสงอาทิตย์แบบทุ่นลอยน้ำ เขื่อนสิรินธร


