

ช่วงเวลานี้เชื่อว่าหลายคนคงมีเวลาอยู่กับบ้านกันมากขึ้น เรามาหากิจกรรมทำในครอบครัวกันดีกว่า หรือน้องๆ จะประดิษฐ์เป็นโครงงานส่งคุณครูก็เก๋ไก๋ไม่ใช่เล่นเลยนะเออ และนี่ก็คือกระปุกออมสินจอมเขมือบ ที่มีนจะทำงานเมื่อเราวางเหรียญให้แล้วมันก็จะยกเทเข้าปากตัวเองทันที ที่สำคัญไม่ต้องใช้หัวแร้งบัดกรีแต่อย่างใด
เครื่องมือและอุปกรณ์
- แผงวงจร i-BEAM (จะซื้อเฉพาะแผงวงจรหรือซื้อเป็นชุดหุ่นยนต์ i-Beam ก็ได้) (สั่งซื้อ i-Beam มาใช้งานคลิกที่นี่)
- แผงวงจรตรวจจับแสงอินฟราเรดสะท้อน (ZX-03 หากมีชุดหุ่นยนต์ i-Beam อยู่แล้ว ไม่ต้องซื้อเพิ่ม) (สั่งซื้อ ZX-03 มาใช้งานคลิกที่นี่)
- เฟืองขับมอเตอร์ BO1 อัตราทด 120:1 (สั่งซืื้อชุดเฟืองมอเตอร์ BO1 มาใช้งานคลิกที่นี่)
- กระดาษแข็ง (Card Board) หนาไม่เกิน 3 มิลลิเมตร
- ลวดงานประดิษฐ์หรือสายไฟแข็งเบอร์ 4 สำหรับทำกลไกขยับแขนและยกปากให้อ้า
- ปืนยิงกาวซิลิโคน
เมื่อเตรียมอุปกรณ์เรียบร้อยแล้วก็มาลงมือประดิษฐ์กันได้เลยจ้า

ขั้นตอนการประดิษฐ์
เริ่มจากส่วนหัว
1. ตัดกระดาษขนาด 8x8cm. จำนวน 4 ชิ้น ดังรูปที่ 1.1

2. ประกอบเข้าด้วยกันด้วยปืนกาว ดังรูปที่ 2.1 นำกระดาษแข็งอีกแผ่นมาทาบแล้วประกอบทำส่วนปิดหัวแล้วยึดด้วยกาวร้อนดังรูปที่ 2.2 ถึง 2.4

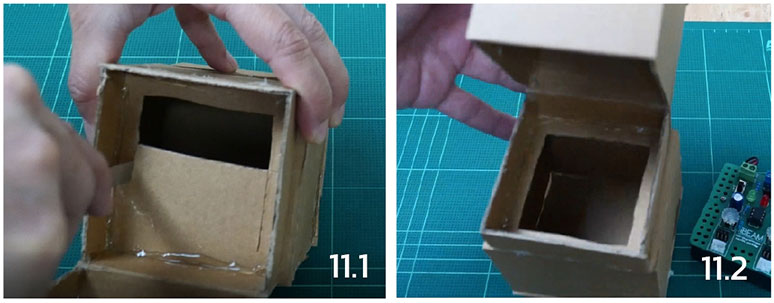
3. ใช้คัตเตอร์กรีดทำปากให้เหนือปากกล่องขึ้นมาประมาณ 2cm. จากนั้นใช้คัตเตอร์กรีดด้านหน้าและด้านข้างทั้งซ้ายและขวา จะได้ส่วนหัวที่อ้าปากได้ดังรูปที่ 3.3

ส่วนของลำตัว
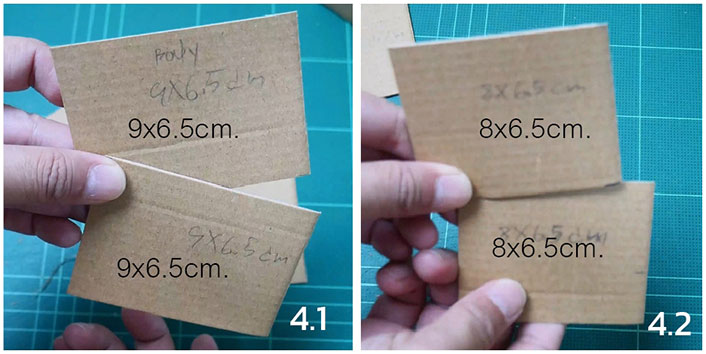
4. ตัดกระดาษขนาด 9×6.5cm 2 ชิ้น และ 8×6.5cm. 2 ชิ้น
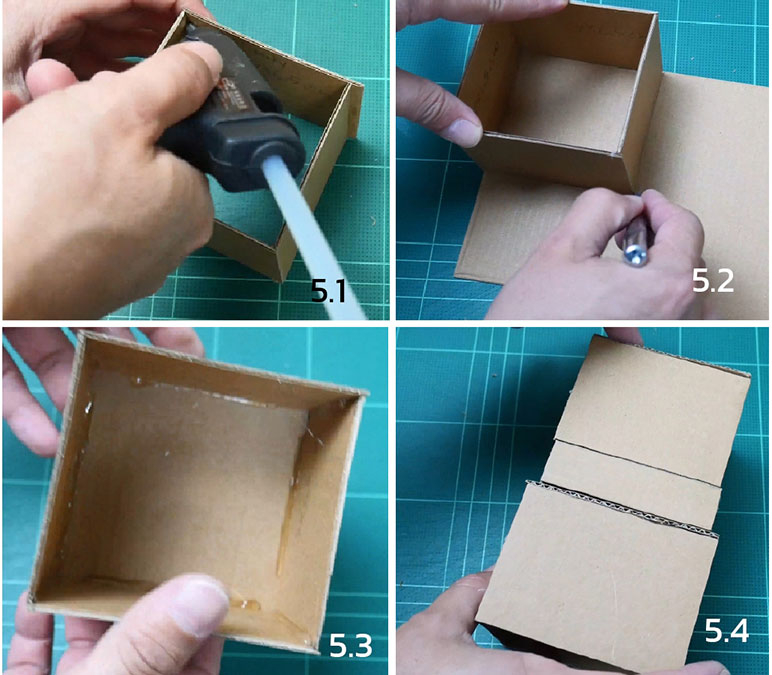
5. ประกอบเป็นกล่องด้วยปืนกาวดังรูปที่ 5.1 จากนั้นนำกระดาษแข็งอีกแผ่นมาทาบแล้ววาดด้วยดินสอและตัดเพื่อใช้ประกอบเป็นส่วนปิด (ตัดมา 2 ชิ้น) เพื่อจะได้นำไปต่อกับส่วนหัวได้ดังรูปที่ 5.4
6. ประกอบส่วนหัวเข้ากับลำตัวด้วยปืนยิงกาวดังรูปที่ 6.2

7. นำกระดาษแข็งอีกชิ้นที่ตัดไว้จากข้อ 5 มาประกบปิดกล่องลำตัวด้วยปืนกาว

ต่อเติมส่วนขา
8. นำกระดาษแข็ง 8×2.5cm. มาประกอบเป็นส่วนขาด้วยปืนกาวดังรูปที่ 8.2

ทำส่วนกลไก
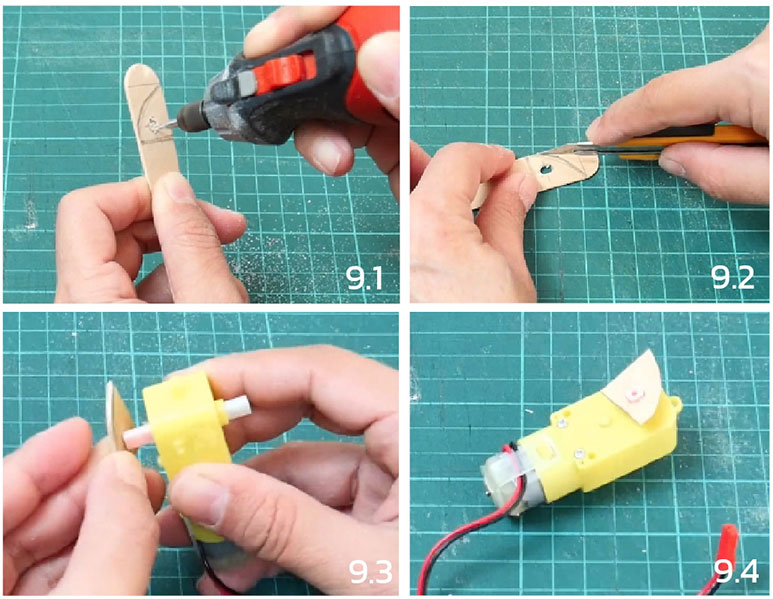
9. ใช้ดินสอวาดไม้ไอติมให้เป็นรูปทรงดังรูปที่ 9.1 จากนั้นใช้สว่านเซาะให้เป็นรูปทรงวงรีและนำมาสวมกับแกนของเฟืองขับมอเตอร์ BO1 ดังรูปที่ 9.3 และ 9.4
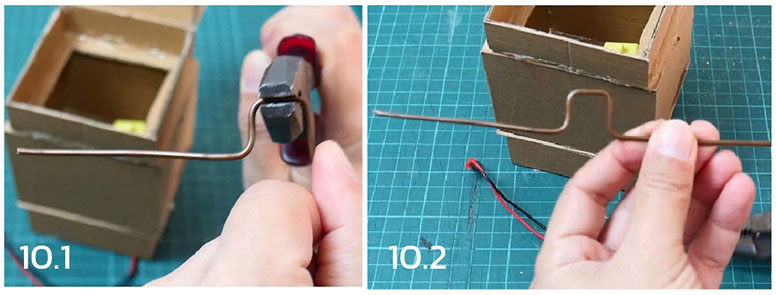
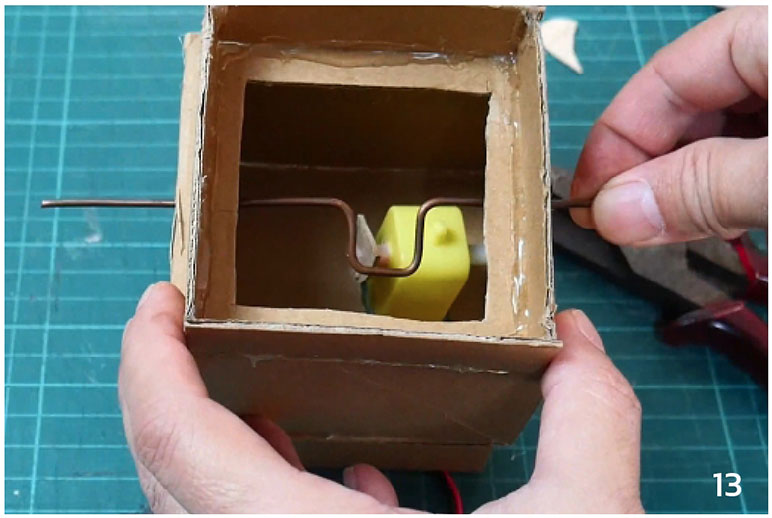
10. ใช้ลวดหรือสายไฟแข็ง มาดัดเป็นรูปตัวยู เพื่อใช้เป็นตัวกระเดื่องรับการตีจากไม้ไอติมที่เราติดตั้งไว้ในขั้นตอนที่ 9
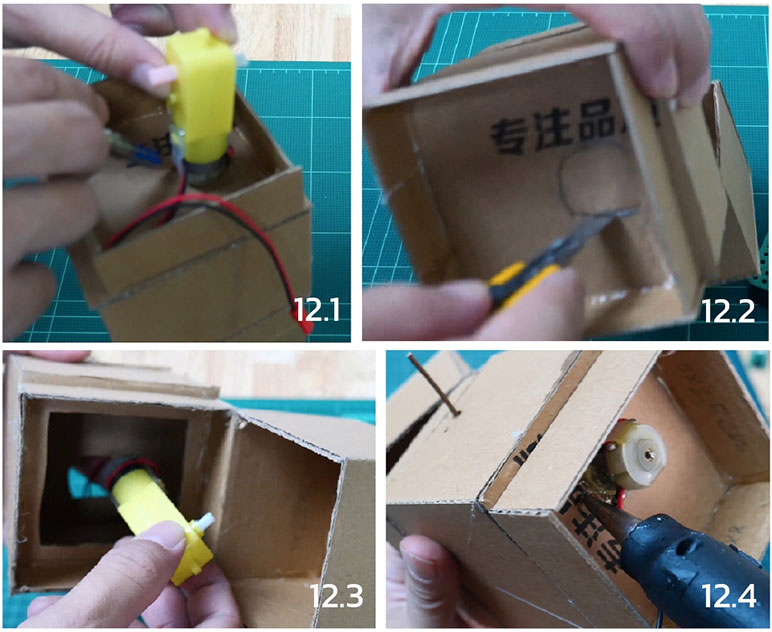
11. ใช้คัตเตอร์เจาะส่วนหัวและลำตัวให้ทะลุถึงกัน
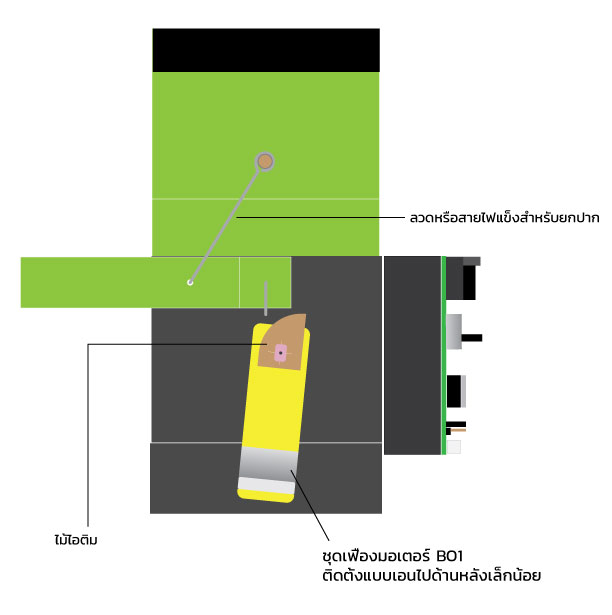
12. ติดตั้งเฟืองขับมอเตอร์ BO1 ในลักษณะตั้งขึ้น โดยเจาะรูด้านล่างให้ขนาดเท่ากับส่วนหัวของมอเตอร์ดังรูปที่ 12.2 จากนั้นสอดส่วนหัวมอเตอร์ลงด้านล่าง โดยระวังอย่าให้ใกล้กับลวดมากเกินไป เพราะจะทำให้เมื่อไม้ไอติมเหวี่ยงไปตีลวดแล้วจะทำให้ติดขัดได้ ควรวางให้ห่างออกมาเล็กน้อยหรือวางชุดเฟืองมอเตอร์เอนไปด้านหลังเล็กน้อยด้วยปืนยิงกาวดังรูปที่ 12.5 และ 12.6
13. สอดลวดที่ดัดไว้จากขั้นตอนที่ 10 ลงไป (ดูวิดีโอการทำในยูทูป)
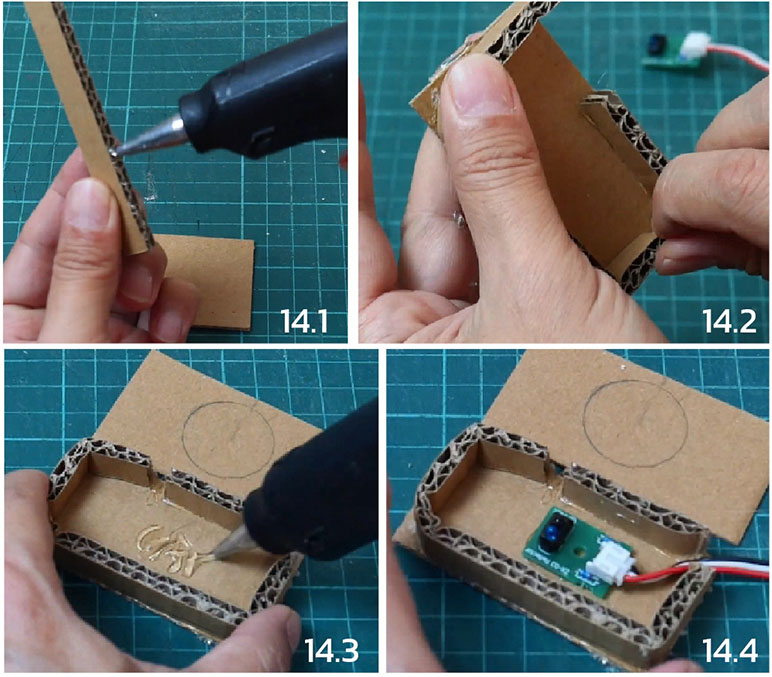
14. ทำส่วนถาดรับเหรียญที่เราจะฝังตัวตรวจจับแบบอินฟราเรดสะท้อน (ZX-03) ไว้ด้านใน ในตัวต้นแบบทำแบบสี่เหลี่ยมง่ายๆ และใช้ปืนยิงกาวยึดตัวตรวจจับไว้ด้านใน

15. ทำแขนโดยตัดกระดาษแข็งขนาดประมาณ 2x9cm จำนวน 4 ชิ้น นำมาประกบกันข้างละ 2 ชิ้น ด้วยปืนยิงกาว

16. ติดตั้งแขนโดยใช้ปลายลวดแทงทะลุออกมาดังรูปที่ 16.2 และพับลวดดังรูป 16.3 (ระวังอย่าให้แขนชิดกับลำตัวจนแน่นเกินไป) จากนั้นติดให้แน่นด้วยปืนยิงกาว

17. นำไม้ไอติมยึดระหว่างแขนทั้งสองข้างดังรูปที่ 17.2 จากนั้นนำชุดตัวตรวจจับที่ทำไว้ในขั้นตอนที่ 14 มาติดตั้งด้วยปืนยิงกาว

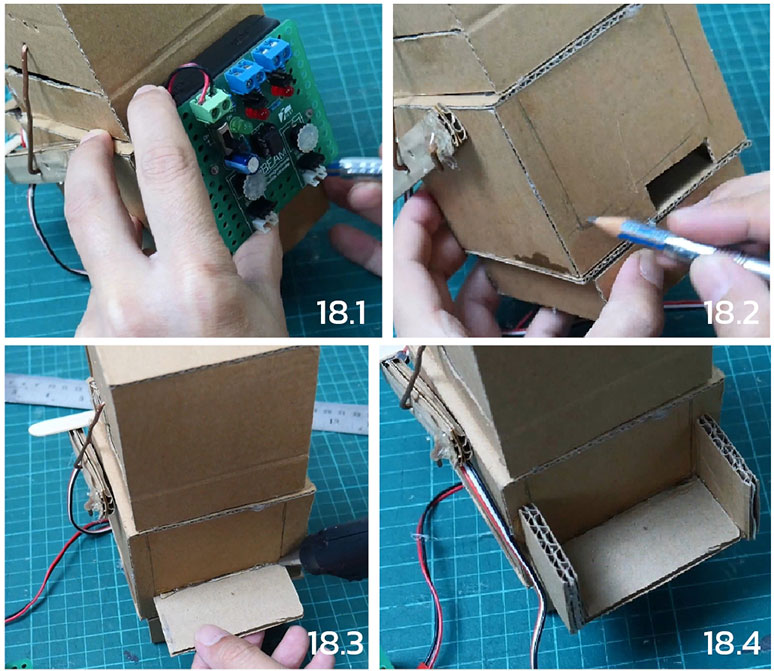
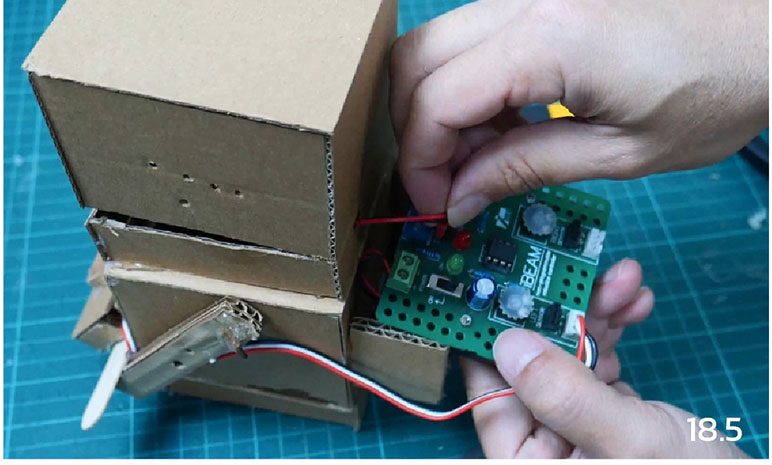
18. นำชุดแผงวงจร iBeam มาวางทาบด้านหลังเพื่อทำที่วางแผงวงจร ใช้ดินสอร่างตามรอยแผงวงจรดังรูปที่ 18.2 ตัดกระดาษแข็งมามาติดตามรูปทรงที่ร่างไว้ดังรูปที่ 18.3 และจะได้กะบะบรรจุแผงวงจร iBeam ดังรูปที่ 18.4 เจาะช่องสอดสายมอเตอร์ออกมาจากด้านในดังรูปที่ 18.5
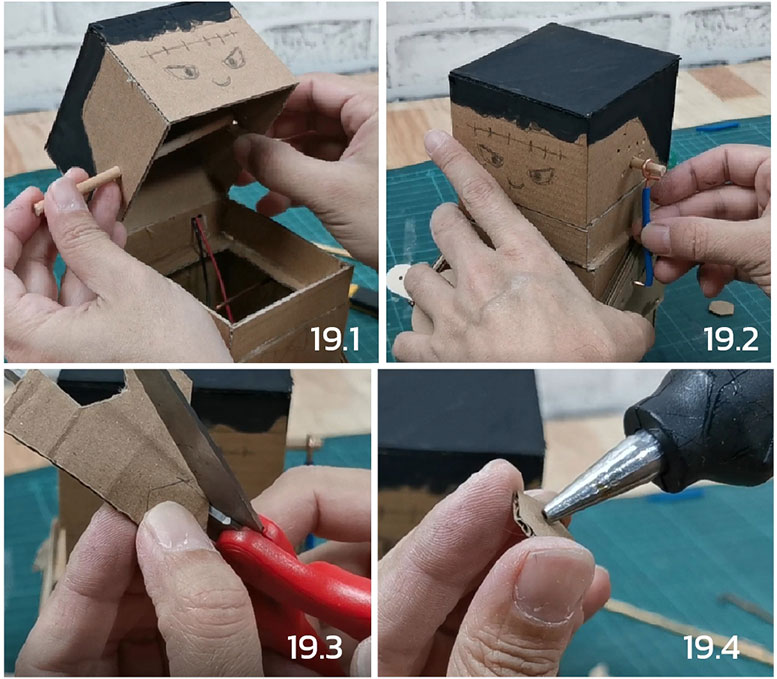
19. ใช้ไม้กลมขนาดเส้นผ่านศูนย์กลางประมาณ 0.5cm ยาว 12cm. ทำเป็นเหมือนสกรูที่โผล่ออกมาจากหัวของแฟรงเกน ทำกลไกสำหรับอ้าปาก โดยการดัดสายไฟเป็นวงกลมคล้องกับไม้อีกปลายหนึ่งเสียบเข้ากับแขน จากนั้นตัดกระดาษแข็งทรง 6 เหลี่ยมทำเป็นหัวสกรูแล้วยึดเข้ากับปลายไม้กลมทั้ง 2 ด้าน ดังรูปที่ 19.3 ถึง 19.5

20. เสร็จแล้วหุ่นยนต์กระปุกออมสินจอมเขมือบของเรา

ต่อไปก็ระบายสีตามจินตนาการได้เลยจ้า


ปัญหาที่พบ
(1) การติดขัดของกลไกการยกแขน
- แกนมอเตอร์ใกล้ลวดมากเกินไป ควรติดตั้งมอเตอร์เอนไปด้านหลังเล็กน้อย
(2) เหรียญไม่เข้าปาก
- ระยะของลวดยกปากไม่เหมาะสม ลองย้ายตำแหน่งที่แขนออกมาเล็กน้อยเพื่อเพิ่มระยะการอ้าของปาก



