อุปกรณ์อิเล็กทรอนิกส์ พื้นฐานที่เราจะต้องรู้จักคือ ตัวเก็บประจุหรือคาปาซิเตอร์ (capacitor) ซึ่งมีด้วยกันหลายชนิดและมีการนำไปใช้งานที่แตกต่างกัน แต่ทำไมค่าของตัวเก็บประจุ มีแต่ค่าพิโกฟารัด (pF : 10-12 ฟารัด ), นาโนฟารัด (nF : 10-9 ฟารัด) และไมโครฟารัด (m : 10-6 ฟารัด) ไม่เห็นมีค่าฟารัด (Farad) ให้ใช้งานเลย คำตอบที่ได้คือ มันเป็นค่าที่ใหญ่มาก ต่อมาเราจึงได้เห็นพัฒนาการของตัวเก็บประจุซึ่ทำให้เราได้ใช้งานตัวเก็บประจุค่า 0.1F, 0.33F และ 0.68F ซึ่งนำมาใช้ในการเป็นแหล่งจ่ายไฟสำรองชั่งคราว
แต่ในปัจจุบันนี้เรามีตัวเก็บประจุในหน่วยฟารัดออกมาให้ใช้งานกันแล้ว มันมีชื่อเรียกว่า ซูเปอร์คาปาซิเตอร์ (Super Capacitor) มีให้เลือกตั้งแต่ 1 ฟารัดไปจนถึงหลายสิบ หลายร้อยฟารัดเลยทีเดียว
คุณสมบัติเด่นของซูเปอร์คาปาซิเตอร์ ตัวเก็บประจุความจุสูงพิเศษ
- มีค่าความจุสูงถึงสูงมาก (1 ถึงหลายสิบ หลายร้อยฟารัด) ให้เลือกใช้ ภายใต้ขนาดของตัวถังที่ไม่ใหญ่ หรืออาจกล่าวได้ว่า เล็กมากเมื่อเทียบกับค่าความจุไฟฟ้า
- ใช้เทคโนโลยีนำไฟฟ้าแบบ 2 ชั้น (Electrical Double-Layer) ซึ่งไม่มีการใช้ไดอิเล็กตริกที่เป็นของแข็งดังที่ใช้ในการผลิตตัวเก็บประจุด้วยเทคโนโลยีเก่า และใช้ปฏิกิริยาทางเคมีในลักษณะเดียวกับแบตเตอรี่ ทำให้สามารถเพิ่มความจุไฟฟ้าได้มาก จึงเรียกตัวเก็บประจุแบบนี้ว่า EDLC (Electrical Double-Layer Capacitor)
- ไม่ต้องการวงจรประจุหรือคายประจุที่พิเศษแต่อย่างใด
- การประจุและคายประจุด้วยแรงดันที่เกินไม่ส่งผลให้เกิดการจดจำค่าแรงดันหรือ memory effect ดังเช่นที่พบในแบตเตอรี่แบบประจุได้
- ใช้เทคโนโลยีพลังงานสะอาดในการผลิต
- เนื่องจากสามารถบัดกรีเข้ากับแผ่นวงจรพิมพ์ได้ ทำให้ไม่มีปัญหาเรื่องหน้าสัมผัสในการเชื่อมต่อเพื่อใช้งาน
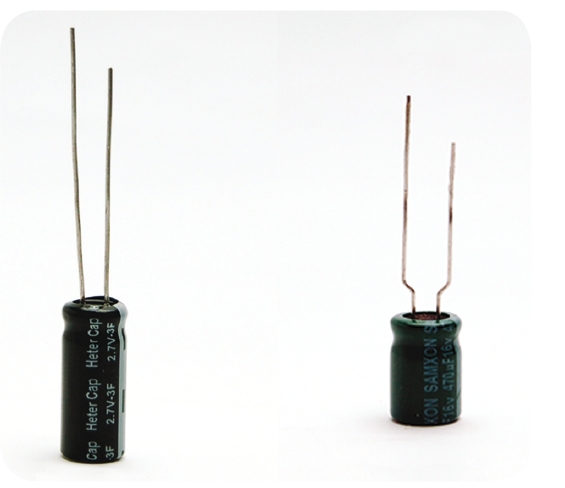
รูปที่ 1 หน้าตาของซูเปอร์คาปาซิเตอร์แบบความต้านทานต่ำหรือ Low ESR คล้ายตัวเก็บประจุอิเล็กทรอไลต์ทั่วไป ที่น่าทึ่งคือ มันมีความจุ 3.3F 2.5V (ซ้าย) ซึ่งมากกว่า 470µF 16V (ขวา) ที่วางเปรียบเทียบกันถึงกว่า 7,000 เท่า แต่มีขนาดเกือบเท่ากัน
ข้อจำกัดของซูเปอร์คาปาซิเตอร์
- อายุการใช้งาน เนื่องจากอายุของสารอิเล็กทรอไลต์ที่นำมาทำเป็นไดอิเล็กตริก
- สารอิเล็กทรอไลต์อาจรั่วออกมาจากตัวเก็บประจุได้ หากใช้งานไม่ถูกวิธี
- ไม่สามารถใช้ในการถ่ายทอดสัญญาณไฟสลับได้
- มีพิกัดแรงดันให้เลือกใช้งานไม่สูง ส่วนใหญ่อยู่ในย่าน 2 ถึง 5V (แต่เชี่อว่า ในอนาคตจะสามารถทำได้)
ตัวอย่างงานที่นำซูเปอร์คาปาซิเตอร์ไปใช้
1. ใช้ในวงจรจ่ายไฟสำรองสำหรับรักษาข้อมูลในหน่วยความจำของ เครื่องตั้งเวลา, ระบบสมองกลฝังตัว, เครื่องเล่น DVD และเครื่องเสียงสมัยใหม่ที่ต้องการเก็บข้อมูลการใช้งานของผู้ใช้งาน
2. ใช้เป็นแหล่งจ่ายไฟชั่วคราวสำหรับอุปกรณ์หรือเครื่องมืออิเล็กทรอนิกส์แบบพกพาเมื่อมีการเปลี่ยนแบตเตอรี่ โดยแรงดันที่ตัวเก็บประจุนี้สะสมไว้จะนำมาใช้เป็นไฟเลี้ยงระบบแทนที่แบตเตอรี่จนกว่าการเปลี่ยนแบตเตอรี่จะเสร็จสมบูรณ์
3. ใช้เป็นแหล่งจ่ายไฟสำรองสำหรับระบบที่ใช้ไฟเลี้ยงจากเซลแสงอาทิตย์ เช่นนาฬิกาข้อมือ, ระบบควบคุมเวลา และระบบบันทึกข้อมูลแบบพกพา โดยกลางวันที่มีแดดจะใช้พลังงานจากเซลรับแสงอาทิตย์และมีการประจุแรงดันไว้ที่ตัวเก็บประจุ เมื่อถึงเวลากลางคืนที่ไม่มีแดด ระบบก็จะเปลี่ยนมาใช้ไฟเลี้ยงจากตัวเก็บประจุความจุสูงหรือซูเปอร์คาปาซิเตอร์นี้
4. ใช้เป็นแหล่งพลังงานชั่วคราวสำหรับรถยนต์ไฮบริดจ์ในขณะที่รถยนต์มีการเบรกหรือในช่วงสตาร์ตเครื่องยนต์
Electrical Double-Layer : ชั้นนำไฟฟ้า 2 ชั้น เทคโนโลยีที่ทลายข้อจำกัด
ในรูปที่ 2 แสดงโครงสร้างทางวัสดุของตัวเก็บประจุความจุสูงนี้ จะเห็นว่า มีส่วนประกอบที่สำคัญตัวหนี่งซึ่งเป็นปัจจัยหลักที่ทำให้เกิดตัวเก็บประจุความจุสูงนี้ขึ้นมาได้ นั่นคือ ผงถ่านกัมมันต์หรือ Activated Charcoal ซึ่งได้รับการจัดการให้มี 2 ชั้นคือ ชั้นแอโนดและชั้นแคโทด โดยมีอิเล็กทรอไลต์ทำหน้าที่เป็นไดอิเล็กตริก ด้วยคุณสมบัติที่พิเศษของผงถ่านกัมมันต์ซึ่งสามารถดูดซับอิเล็กตรอนได จึงทำให้มันกลายสภาพเป็นขั้วไฟฟ้าหรืออิเล็กโตรดได้ ดังนั้นจึงทำให้ดูเหมือนกับว่ามีชั้นตัวนำไฟฟ้า 2 ชั้นซ้อนกัน นั่นจึงทำให้เราสามารถมีพื้นที่สำหรับเก็บประจุไฟฟ้าได้มากขึ้นอย่างมหาศาลเมื่อเทียบกับเทคโนโลยีในการผลิตตัวเก็บประจุแบบเดิม
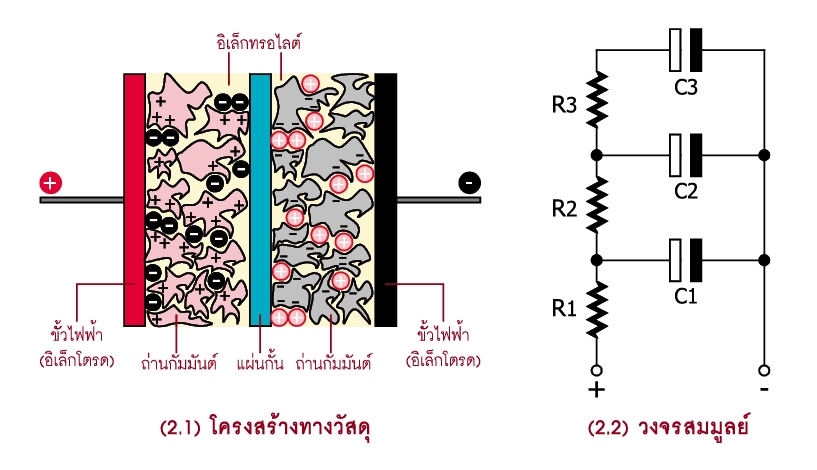
รูปที่ 2 แสดงโครงสร้างทางวัสดุของซูเปอร์คาปาซิเตอร์หรือตัวเก็บประจุความจุสูงพิเศษและวงจรสมมูลย์
ถ่านกัมมันต์หรือ Actived Charcoal คือตัวเปลี่ยนเทคโนโลยี
ถ่านกัมมันต์เป็นถ่านที่พัฒนาขึ้นจากเทคโนโลยีในระดับนานโนเพื่อทำให้โครงสร้างทางกายภาพของถ่านเกิดรูพรุนหรือรอยแตกขนาดเล็กในระดับนาโนเมตร (10-9 เมตร) จำนวนมาก ซึ่งภายในผนังรูพรุนนี้เองคือ พื้นที่ที่ทำการกักหรือเก็บประจุไฟฟ้า จึงอาจมองได้ว่า ถ่านกัมมันต์ทำหน้าที่เหมือนฟองน้ำที่ดูดหรือซึมซับเอาประจุไฟฟ้าเข้ามารวมกันไว้ ทำให้ถ่าน กัมมันต์กลายเป็นขั้วไฟฟ้าได้ในที่สุด
การนำถ่านกัมมันต์มาใช้ในการสร้างตัวเก็บประจุจะมารูปของผงถ่านที่เคลือบลงบนแผ่นฟอยล์อะลูมิเนียมที่นำมาทำเป็นขั้วไฟฟ้าในตัวเก็บประจุ

รูปที่ 3 หน้าตาของถ่านกัมมันต์หรือ แบบหนึ่ง
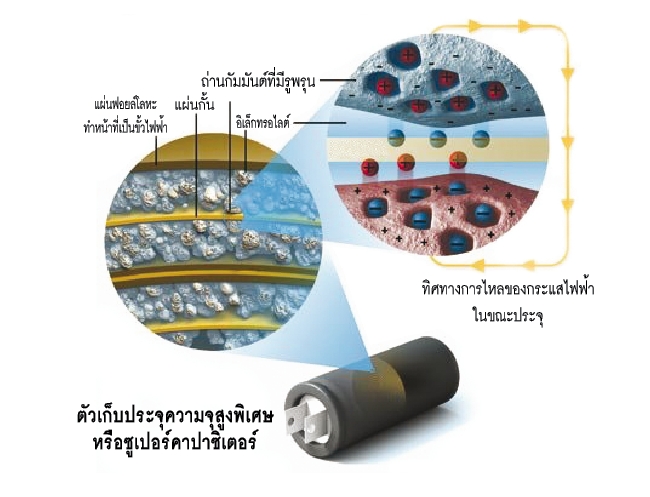
รูปที่ 4 ภาพขยายเพื่อแสดงให้เห็นผิวของถ่านกัมมันต์ที่เป็นรูพรุนสำหรับกักเก็บประจุไฟฟ้าและโครงสร้างภายในของตัวเก็บประจุความจุสูงพิเศษ
ขั้นตอนการผลิตซูเปอร์คาปาซิเตอร์
ในรูปที่ 5 แสดงขั้นตอนการผลิตซูเปอร์คาปาซิเตอร์หรือตัวเก็บประจุความจุสูง อธิบายได้ดังนี้
(1) เคลือบผงถ่านกัมมันต์ลงบนแผ่นฟอยล์อะลูมิเนียม เพื่อสร้างขั้ว ไฟฟ้าจากถ่านกัมมันต์ (activated charcoal electrode) โดยแบ่งการทำเป็นขั้วแอโนดและแคโทด
(2) ติดตั้งขั้วหรือขาต่อนำไฟฟ้าเข้ากับชั้นแอโนดและแคโทด
(3) นำกระดาษที่ชุบสารละลายอิเล็กทรอไลต์มาคั่นระหว่างชั้นแอโนดและแคโทด แล้วม้วนเป็นทรงกระบอก ติดด้วยเทปเพื่อรักษารูปทรงไว้
(4) นำตัวถังของตัวเก็บประจุมาหุ้มพร้อมกับติดยางหุ้มขา เพื่อป้องกันไม่ให้ขาของตัวเก็บประจุต่อถึงกัน
(5) หุ้มฉลากที่ระบุยี่ห้อ ค่าความจุ และพิกัดการใช้งานลงบนตัวถัง ก็จะได้ตัวเก็บประจุความจุสูงพิเศษหรือซูเปอร์คาปาซิเตอร์มาใช้งาน
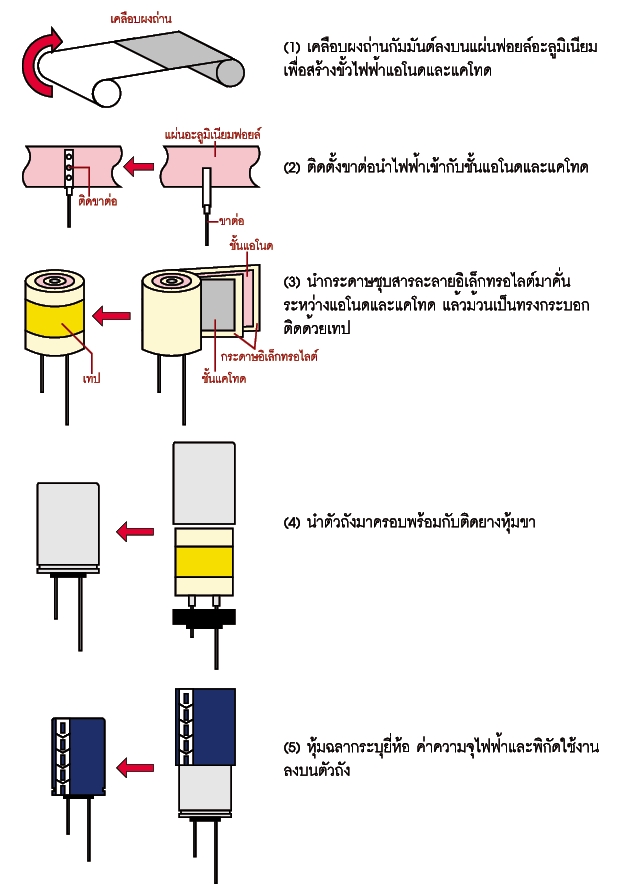
รูปที่ 5 ขั้นตอนการผลิตตัวเก็บประจุความจุสูง (www.elna.com)
ซูเปอร์คาปาซิเตอร์ V.S. แบตเตอรี่
ในตารางที่ 1 แสดงการเปรียบเทียบคุณสมบัติในด้านต่างๆ ของตัวเก็บประจุความจุสูงพิเศษนี้กับแบตเตอรี่และตัวเก็บประจุชนิดอิเล็กทรอไลต์ในแบบดั้งเดิม จะเห็นได้ว่าตัวเก็บประจุ EDLC มีข้อโดดเด่นในด้านเทคโนโลยีของวัสดุที่นำมาใช้ในการผลิต, สารอิเล็กทรอไลต์ที่นำมาใช้เป็นชนิดที่ผลิตจากวัสดุธรรมชาติ จึงไม่ก่อมลภาวะ และสามารถประจุซ้ำใหม่ได้มากกว่า 100,000 รอบ ซึ่งมากกว่าแบตเตอรี่ทุกชนิด

ตารางที่ 1 การเปรียบเทียบคุณสมบัติต่างๆ ระหว่างตัวเก็บประจุความจุสูงพิเศษที่ใช้ เทคโนโลยี EDLC, ตัวเก็บประจุอิเล็กทรอไลต์มาตรฐาน และแบตเตอรี่

รูปที่ 6 ตัวอย่างของซูเปอร์คาปาซิเตอร์แบบต่างๆ