


เซอร์โวมอเตอร์ (servo motor) เป็นอุปกรณ์ แม่เหล็กไฟฟ้าแบบหนึ่งที่ใช้ในการหมุนตัวขับ (actuator) ไปยังตำแหน่งต่างๆ ด้วยความแม่นยำ โดยใช้สัญญาณพัลส์เพื่อกำหนดตำแหน่งในการหมุน มักนิยมใช้ในรถบังคับวิทยุ เครื่องบินบังคับวิทยุ หรือใช้ควบคุมแขนขาของหุ่นยนต์ ส่วนใหญ่จะรู้จักกันภายใต้ชื่อว่า RC เซอร์โวมอเตอร์ โดยคำว่า RC มาจาก Radio Control หรือการบังคับด้วยวิทยุ เนื่องจากในยุคแรกๆ ของการพัฒนาเซอร์โวมอเตอร์ จะถูกนำมาใช้ในงานวิทยุบังคับเป็นหลัก
ปกติแล้วเซอร์โวมอเตอร์ที่ยังไม่ได้รับการปรับแต่งใดๆ นั้นจะใช้ในการควบคุมตำแหน่งของอุปกรณ์ เช่น การบังคับเลี้ยวของรถบังคับวิทยุ หรือใช้สำหรับปรับหางเสือของเรือหรือ เครื่องบิน ซึ่งงานเหล่านี้ต้องการแรงบิด
ของมอเตอร์ที่สูงพอสมควร ดังนั้นเซอร์โวมอเตอร์จึงต้องมีอัตราทดที่มากพอ เพื่อให้สามารถรองรับงานดังกล่าวได้ เซอร์โวมอเตอร์มาตรฐานจะมีมุมในการหมุนอยู่ระหว่าง 90 ถึง 180 องศา แล้วแต่ ผู้ผลิต แต่ที่นิยมมากที่สุดคือ 0 ถึง 180 องศา และในบางรุ่นของบางผู้ผลิตจะสามารถดัดแปลง ให้หมุนได้ครบ 360 องศาด้วย
ปัจจุบันเซอร์โวมอเตอร์มีด้วยกัน 2 ชนิดหลักๆ คือ ชนิดอะนาลอกและดิจิตอลรูปร่างภายนอกของเซอร์โวมอเตอร์ทั้งสองชนิดจะคล้ายกันมาก ความแตกต่างจะอยู่ที่วงจรควบคุมที่อยู่ภายใน โดยในชนิดอะนาลอกจะใช้วงจรอิเล็กทรอนิกส์ที่ประกอบด้วยอุปกรณ์ สารกึ่งตัวนำจำพวก ทรานซิสเตอร์ มอสเฟต หรือไอซีออปแอมป์เป็นหลัก ในขณะที่ชนิดดิจิตอลจะใช้ ไมโครโปรเซสเซอร์หรือไมโครคอนโทรลเลอร์เป็นตัวควบคุมหลัก
โครงสร้างของเซอร์โวมอเตอร์
ภายในเซอร์โวมอเตอร์ประกอบด้วย มอเตอร์ไฟตรงขนาดเล็ก,ชุดเฟืองทด, แผงวงจรควบคุม และตัวต้านทานปรับค่าได้ (POT : Potentiometer) โดยแผงวงจรควบคุมจะมีวงจรป้อนกลับ เพื่อให้เซอร์โวมอเตอร์รับรู้ตำแหน่งของตัวเองได้ โดยผู้ใช้งานเพียงส่งสัญญาณพัลส์ออกไปควบคุมเท่านั้น ดังแสดงไดอะแกรมการทำงานของเซอร์โวมอเตอร์ในรูปที่ 1 แกนของมอเตอร์ไฟตรงจะต่อเข้ากับ ชุดเฟืองเพื่อลดความเร็วรอบลงส่งผลให้แรงบิดที่แกนหมุนมากขึ้น ทั้งหมดทำงานร่วมกันภายใต้ ความสัมพันธ์
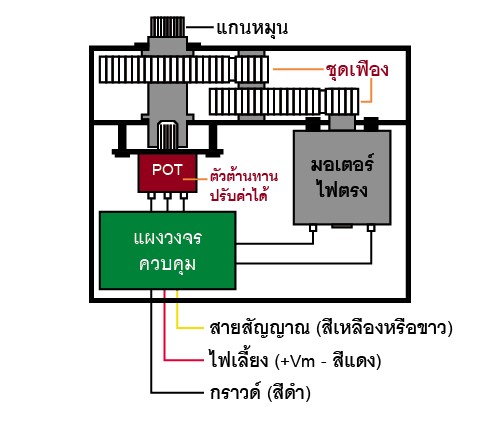
รูปที่ 1 แสดงไดอะแกรมการทำงานของเซอร์โวมอเตอร์
P = kwg
โดยที่ P คือ พลังงานที่ป้อนให้แก่มอเตอร์
k คือ ค่าคงที่
w คือ ความเร็วรอบ ในหน่วย รอบต่อนาที (rpm : round per minute)
g คือ แรงบิดหรือทอร์ค (torque)
ถ้าหากพลังงานที่จ่ายให้คงที่ เมื่อลดความเร็วรอบลงนั่นย่อมทำให้แรงบิดของมอเตอร์เพิ่มขึ้น การหมุนของมอเตอร์ได้รับการควบคุมจากวงจรควบคุม โดยมีตัวต้านทานปรับค่าได้เป็นตัวกำหนดขอบเขตของแกนหมุน ซึ่งหากไม่มีการปรับแต่งใดๆ แกนหมุนของมอเตอร์จะสามารถหมุนได้ในขอบเขต 0 ถึง 180 องศา (หรือน้อยกว่าขึ้นกับผู้ผลิต) ดังนั้นในการปรับแต่งให้เซอร์โวมอเตอร์สามารถขับแกนหมุนได้รอบตัวจึงมักจะใช้วิธีการถอดตัวต้านทานปรับค่าได้ออก แล้วแทนที่ด้วยตัวต้านทานค่าคงที่ 2 ตัว หรือดัดแปลงให้แกนหมุนของตัวต้านทานปรับค่าได้สามารถหมุนได้รอบตัว แกนหมุนของเซอร์โวมอเตอร์จะมีส่วนปลายเป็นร่องเฟือง (spline) เพื่อให้สามารถติดตั้งอุปกรณ์ที่ใช้ในการเชื่อมโยงไปยังตัวขับหรือกลไกอื่นๆ อุปกรณ์ที่ใช้เชื่อมโยงนั้นเรียกว่า ฮอร์น (horn) ซึ่งมีด้วยกันหลายรูปแบบทั้งแบบเป็นแขน, เป็นแท่ง, กากบาท, แผ่นกลม เป็นต้น สำหรับร่องเฟืองของเซอร์โวมอเตอร์แต่ละยี่ห้อก็มีจำนวนไม่เท่ากัน โดยของ Hitec จะมี 24 ร่องเฟือง ส่วนของ Futaba มี 25 ร่องเฟือง ทำให้ฮอร์นของทั้งสองยี่ห้อไม่สามารถใช้ร่วมกันได้

รูปที่ 2 แสดงการจัดสายสัญญาณของเซอร์โวมอเตอร์

รูปที่ 3 ลักษณะคอนเน็กเตอร์ของเซอร์โวมอเตอร์
คุณสมบัติทางเทคนิคที่สำคัญของ เซอร์โวมอเตอร์
มี 2 ค่าคือ ความเร็ว (speed) และแรงบิดหรือทอร์ค (torque) ความเร็วหมายถึง ระยะเวลาที่ทำให้แกนหมุนของมอเตอร์เคลื่อนที่สู่ตำแหน่งมุมที่กำหนด อาทิ เซอร์โวมอเตอร ตัวหนึ่งมีความเร็ว 0.15 วินาทีสำหรับ 60 องศา หมายถึงเซอร์โวมอเตอร์ตัวนี้สามารถขับให้แกนหมุนเคลื่อนที่ไปยังตำแหน่งมุม 60 องศาภายในเวลา 0.15 วินาที ส่วนแรงบิดมักจะปรากฏในหน่วยของออนซ์-นิ้ว (ounce-inches : oz-in) หรือ กิโลกรัม-เซนติเมตร (kg-cm) เป็นคุณสมบัติที่จะบอกต่อผู้ใช้งาน ว่าเซอร์โวมอเตอร์ตัวนี้มีแรงในการขับโหลดที่มีน้ำหนักในหน่วยออนซ์ให้สามารถเคลื่อนที่ไปได้ 1 นิ้ว หรือน้ำหนักในหน่วยกิโลกรัมให้เคลื่อนที่ ไปได้ 1 เซนติเมตร (น้ำหนัก 1 ออนซ์เท่ากับ 0.028 กิโลกรัมโดยประมาณ หรือ 1 กิโลกรัม เท่ากับ 35.274 ออนซ์)
อย่างไรก็ตาม ค่าของความเร็วและแรงบิด ต้องสัมพันธ์กับแรงดันไฟเลี้ยงที่จ่ายให้แก่เซอร์โวมอเตอร์ด้วย ซึ่งมักจะแรงดัน 4.8 หรือ 6V นอกจากนั้นยังมีปัจจัยเกี่ยวกับแรง เสียดทานในระบบเฟืองภายในเซอร์โวมอเตอร์ การหล่อลื่นการเชื่อมโยงระหว่างเฟืองต่อเฟืองในชุดเฟืองทด ที่ส่งผลให้ความเร็วและแรงบิดของ เซอร์โวมอเตอร์เปลี่ยนแปลงไปได้
การทำงานของแผงวงจรควบคุมใน เซอร์โวมอเตอร์ชนิดอะนาลอก
การหมุนของเซอร์โวมอเตอร์นั้นจะไม่ได้หมุนเป็นอิสระเหมือนมอเตอร์ทั่วๆ ไปโดยช่วงระยะการหมุนปกติจะอยู่ระหว่าง 90 ถึง 180 องศา ตำแหน่งการหมุนของแกนมอเตอร์ใน เซอร์โวมอเตอร์นี้สามารถควบคุมได้อย่างแม่นยำ เนื่องจากภายในเซอร์โวมอเตอร์มีวงจรอิเล็กทรอนิกส์ทำหน้าที่ตรวจสอบตำแหน่งของเซอร์โวมอเตอร์อยู่ตลอดเวลา ลักษณะการตรวจสอบจะใช้การป้อนกลับค่าตำแหน่งจากตัวต้านทานปรับค่าได้ แล้วนำค่านี้ไป เปรียบเทียบกับค่าพัลส์ที่ป้อนเข้าทางขาควบคุม ค่าของผลต่างที่ได้จะไปปรับตำแหน่งของมอเตอร์ ค่าผลต่างก็จะได้ตำแหน่งของมอเตอร์ที่แม่นยำ

รูปที่ 4 ไดอะแกรมการทำงานของแผงวงจรควบคุมในเซอร์โวมอเตอร์ชนิดอะนาลอก
ในรูปที่ 4 แสดงไดอะแกรมการทำงานของแผงวงจรควบคุมในเซอร์โวมอเตอร์ชนิดอะนาลอก สัญญาณพัลส์ควบคุมที่ส่งเข้ามาทางอินพุต จะถูกส่งไปยังวงจรกำเนิดสัญญาณพัลส์ภายในด้วย โดยมีความกว้างที่เป็น สัดส่วนกับตำแหน่งของแกนหมุนในปัจจุบัน ทั้งสัญญาณพัลส์ที่กำเนิดขึ้นภายในกับสัญญาณพัลส์ควบคุมจะถูกส่งไปยังวงจรเปรียบเทียบเพื่อทำการหักล้างสัญญาณ โดยทิศทางของสัญญาณจะขึ้นอยู่กับว่า ระหว่างสัญญาณพัลส์ควบคุมทางอินพุตกับสัญญาณพัลส์ภายใน สัญญาณพัลส์ใดมีความกว้างมากกว่า โดยเอาต์พุตที่ได้เป็นสัญญาณลอจิก “0” หรือ “1” แล้วส่งไปยังวงจรขับมอเตอร์แบบ H-บริดจ์ เพื่อกำหนดทิศทางการหมุน ทางด้านค่าความแตกต่างที่เกิดขึ้นระหว่างพัลส์ทั้งสองสัญญาณจะถูกส่งไปยังวงจรเพิ่มความกว้างพัลส์ เพื่อสร้างสัญญาณพัลส์สำหรับส่งไปขับมอเตอร์ ผ่านวงจรขับมอเตอร์แบบ H-บริดจ์ โดยความแตกต่างของความกว้างพัลส์ 1% ทำให้เกิดสัญญาณพัลส์สำหรับขับมอเตอร์ในระดับ 50% และความเร็วนี้จะลดลงเมื่อแกนหมุนของมอเตอร์เคลื่อนที่เข้าสู่ตำแหน่งที่กำหนด อันเป็นผลมาจากความแตกต่างของความกว้างสัญญาณพัลส์เริ่มลดลง และหยุดลงเมื่อสัญญาณพัลส์ที่นำมาเปรียบเทียบมีค่าความกว้างเท่ากัน

รูปที่ 5 แสดงลักษณะของสัญญาณพัลส์ที่ใช้ในการควบคุมเซอร์โวมอเตอร์
วัสดุของเฟืองในเซอร์โวมอเตอร์
ชุดเฟืองในเซอร์โวมอเตอร์โดยส่วนใหญ่ผลิตมาจากวัสดุ 3 ชนิด คือ
(1) ไนล่อน : เป็นวัสดุที่นิยมนำมาใช้ผลิตเฟืองมากที่สุด เนื่องจากมีน้ำหนักเบาและมีเสียงรบกวนน้อยเมื่อทำงาน ความทนทานพอสมควรมักพบในเซอร์โวมอเตอร์ขนาดเล็กและราคาถูก
(2) โลหะ : เฟืองที่ผลิตด้วยโลหะจะมีความทน ทานสูง แข็งแรง สามารถทนแรงเสียดทานเมื่อเฟืองขบกันได้สูงมาก ทำให้สามารถนำมาสร้าง เซอร์โวมอเตอร์ที่มีแรงบิดสูงมากได้ โลหะที่พบมากที่สุดในการนำมาผลิตเฟืองคือ ทองเหลือง และถ้าหากมีงบประมาณมากเพียงพอ ควรเลือกใช้เซอร์โวมอเตอร์ที่ใช้เฟืองที่ผลิตจากไทเทเนียม
(3) คาร์บอไนต์ (Karbonite) : เป็นวัสดุพิเศษที่ทำมาจากคาร์บอน แล้วแปรรูปมาเป็นวัสดุที่คล้ายพลาสติก Hitec เป็นผู้ที่นำเทคโนโลยีนี้มาใช้เป็นวัตถุดิบในการผลิตเฟือง โดยคาร์บอไนต์จะมีความแข็งแรงและทนทานมากกว่าเฟืองไนลอน ในขณะที่มีน้ำหนักเบา ดังในเซอร์โวมอเตอร์สมัยใหม่จึงนิยมใช้เฟืองที่ผลิตจากวัสดุชนิดนี้ โดยเฉพาะอย่างยิ่งในเซอร์โวมอเตอร์ชนิดดิจิตอลที่ใช้หุ่นยนต์ Humanoid
รูปแบบสัญญาณที่ใช้ควบคุมเซอร์โวมอเตอร์
การควบคุมเซอร์โวมอเตอร์ทำได้โดยสร้างสัญญาณพัลส์ที่มีคาบเวลา 20 มิลลิวินาทีป้อนให้กับวงจรควบคุมภายในเซอร์โวมอเตอร์ดังรูปที่ 5 แล้วปรับความกว้างของพัลส์ช่วงบวก ที่พัลส์กว้าง 1 มิลลิวินาที มอเตอร์จะหมุนไปตำแหน่งซ้ายมือสุด ถ้าส่งพัลส์กว้าง 1.5 มิลลิวินาที แกนหมุนของมอเตอร์จะเคลื่อนที่ไปยังตำแหน่งกึ่งกลาง และถ้าส่งพัลส์กว้าง 2 มิลลิวินาที แกนหมุนของมอเตอร์จะเคลื่อนที่ไปยังตำแหน่งขวามือสุด การป้อนสัญญาณพัลส์ที่มีคาบเวลาช่วงบวกตั้งแต่ 1.5 ถึง 2 มิลลิวินาทีจะทำให้เซอร์โวมอเตอร์หมุนทวนเข็มนาฬิกา โดยถ้าค่าความกว้างพัลส์ยิ่งห่างจาก 1.5 มิลลิวินาที มากเท่าใด ความเร็วในการหมุนก็จะมากขึ้นเท่านั้น นั่นคือ ความเร็วสูงสุดของการหมุนทวนเข็มนาฬิกาจะเกิดขึ้นเมื่อสัญญาณพัลส์ควบคุมมีความกว้าง 2 มิลลิวินาที การป้อนสัญญาณพัลส์ที่มีคาบเวลาช่วงบวกตั้งแต่ 1 ไปจนถึง 1.5 มิลลิวินาที ทำให้เซอร์โวมอเตอร์หมุนตามเข็มนาฬิกา ซึ่งถ้าค่าความกว้างพัลส์เข้าใกล้ 1 มิลลิวินาทีความเร็วในการหมุนของเซอร์โวมอเตอร์ก็จะมาก นั่นคือ ความเร็วสูงสุดของการหมุนตามเข็มนาฬิกา
จะเกิดขึ้นเมื่อสัญญาณพัลส์ควบคุมมีความกว้าง 1 มิลลิวินาที


